Jak wykryć choinkę?
Jakie techniki przetwarzania obrazów można wykorzystać do wdrożenia aplikacji, która wykrywa choinki wyświetlane na poniższych zdjęciach?






Szukam rozwiązań, które będą działać na tych wszystkich obrazach. Dlatego podejścia wymagające szkolenia klasyfikatorów kaskadowych haar lub dopasowania szablonów nie są zbyt interesujące.
Szukam czegos, co mozna napisac w dowolny język programowania, tak długo, jak używa tylko technologii Open Source . Rozwiązanie musi zostać przetestowane z obrazami, które są udostępniane w tym pytaniu. Istnieje 6 obrazów wejściowych i odpowiedź powinna wyświetlać wyniki przetwarzania każdego z nich. Na koniec, dla każdego obrazu wyjściowego muszą być czerwone linie aby otoczyć wykryte drzewo.
Jak można programowo wykrywać drzewa w tych obrazy?
10 answers
Mam podejście, które moim zdaniem jest interesujące i trochę inne od reszty. Główną różnicą w moim podejściu, w porównaniu z niektórymi innymi, jest to, jak krok segmentacji obrazu jest wykonywany-użyłem algorytmu klastrowania DBSCAN z Pythona scikit-learn; jest on zoptymalizowany do znajdowania nieco amorficznych kształtów, które niekoniecznie muszą mieć pojedynczy wyraźny centroid.
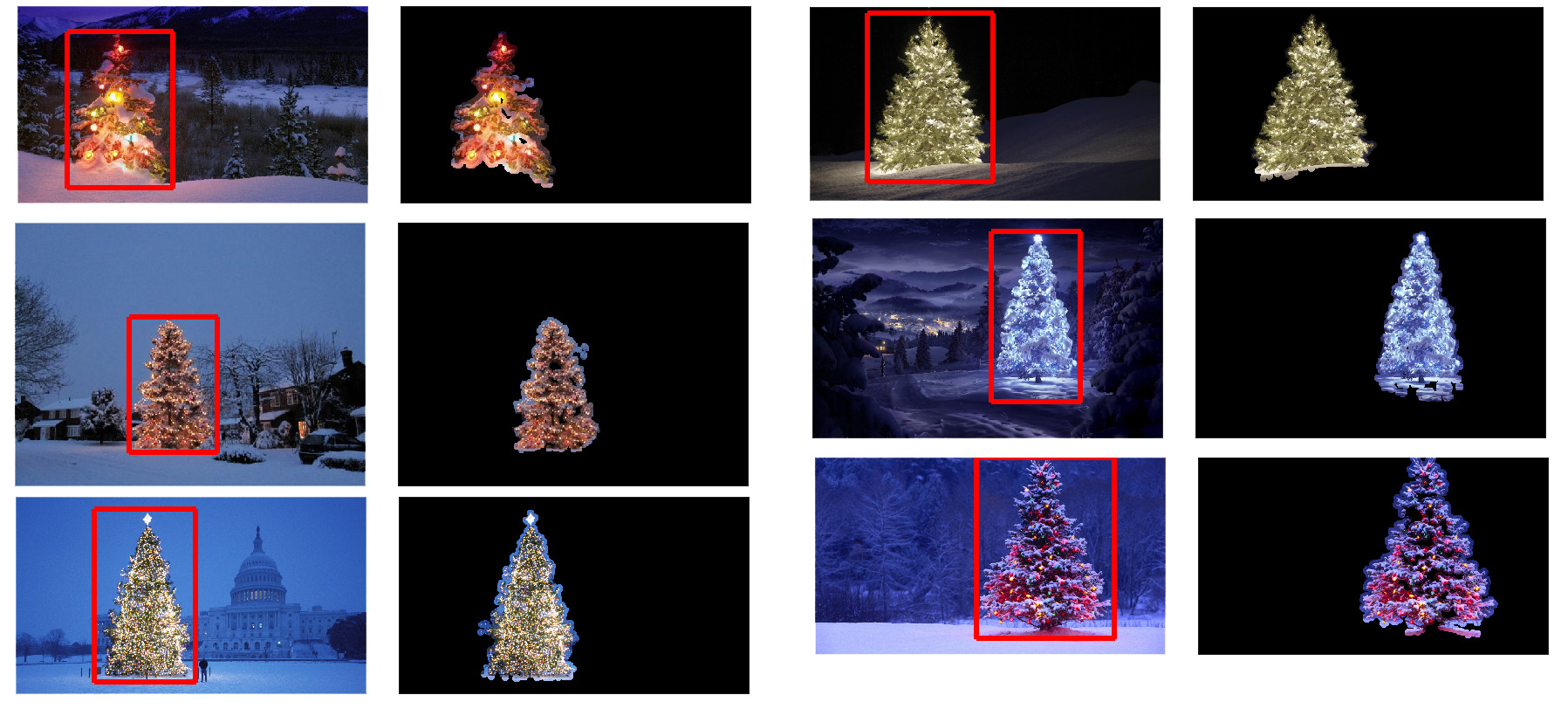
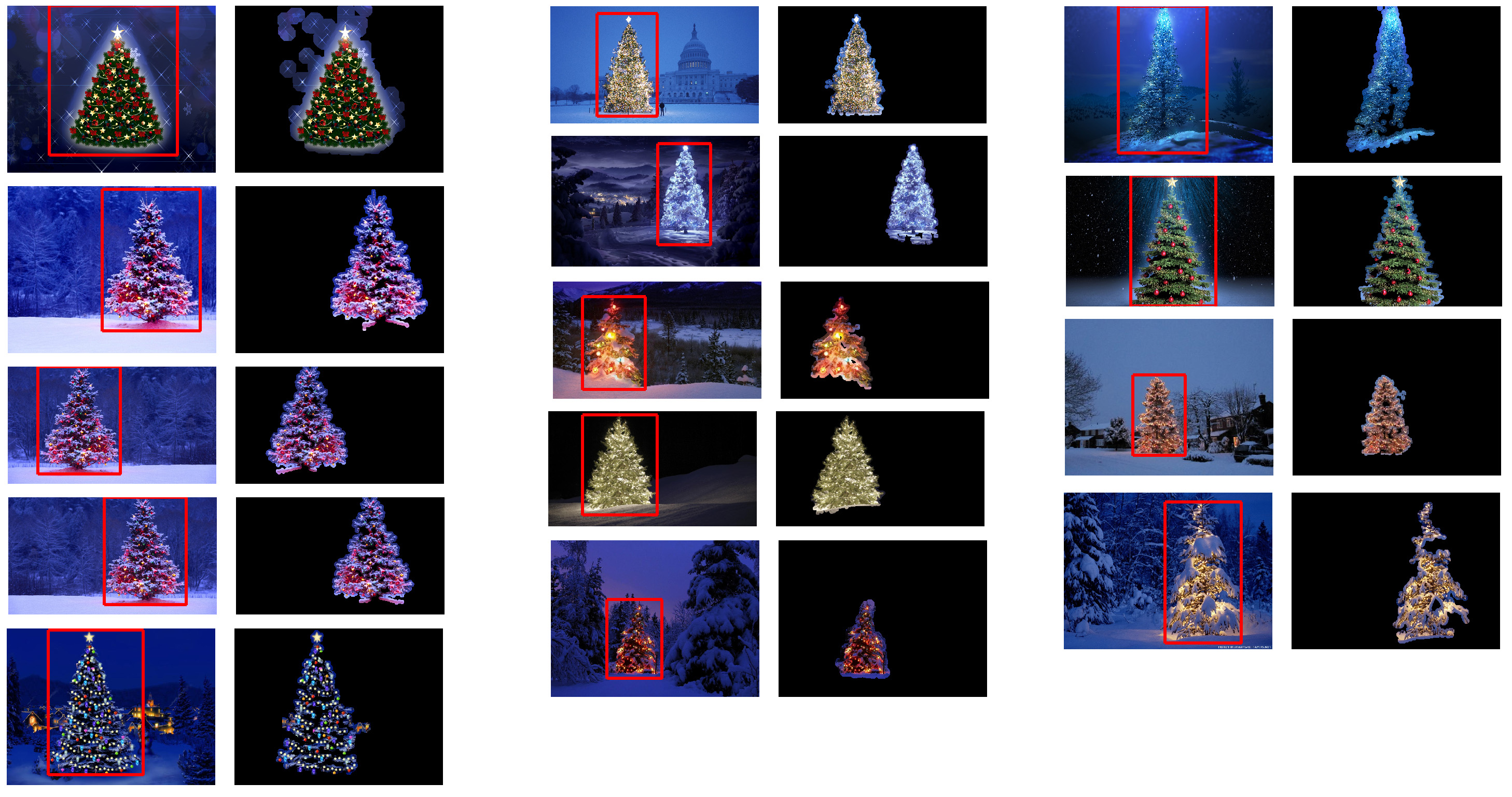
Na najwyższym poziomie moje podejście jest dość proste i można je podzielić na około 3 kroki. Najpierw stosuję próg (a właściwie logiczne "lub" dwóch odrębnych i odrębnych progów). Podobnie jak w przypadku wielu innych odpowiedzi, założyłem, że choinka będzie jednym z jaśniejszych obiektów w scenie, więc pierwszy próg jest tylko prostym monochromatycznym testem jasności; wszelkie piksele o wartościach powyżej 220 w skali 0-255 (gdzie czerń to 0, a biel to 255) są zapisywane na binarnym czarno-białym obrazie. Drugi próg stara się szukać czerwonych i żółtych świateł, które są szczególnie widoczne w drzewach w lewym górnym rogu i prawym dolnym rogu z sześciu obrazów i wyróżniają się dobrze na niebiesko-zielonym tle, które jest powszechne w większości zdjęć. Konwertuję obraz rgb na przestrzeń hsv i wymagam, aby odcień był albo mniejszy niż 0,2 w skali 0,0 - 1,0 (co odpowiada mniej więcej granicy między żółtym i zielonym) lub większy niż 0,95 (co odpowiada granicy między fioletowym i czerwonym), a dodatkowo wymagam jasnych, nasyconych kolorów: nasycenia i nasycenia. wartość obu musi być wyższa niż 0,7. Wyniki dwóch procedur progowych są logicznie " lub " - ed razem, a wynikowa macierz czarno-białych obrazów binarnych jest pokazana poniżej: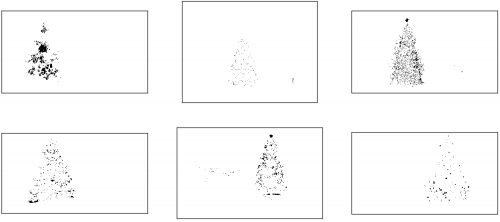
Widać wyraźnie, że każdy obraz ma jeden duży klaster pikseli w przybliżeniu odpowiadający lokalizacji każdego drzewa, plus kilka obrazów ma również inne małe klastry odpowiadające światłom w oknach niektórych budynków lub scenie w tle na ekranie. horyzont. Następnym krokiem jest przekonanie komputera do rozpoznania, że są to oddzielne klastry i prawidłowe oznaczenie każdego piksela numerem identyfikacyjnym członkostwa w klastrze.
Do tego zadania wybrałem DBSCAN . Istnieje całkiem dobre wizualne porównanie zachowania DBSCAN w stosunku do innych algorytmów klastrowania, dostępne tutaj . Jak powiedziałem wcześniej, dobrze radzi sobie z amorficznymi kształtami. Wyjście DBSCAN, z każdym klastrem wykreślonym w innym kolorze, jest pokazane tutaj:
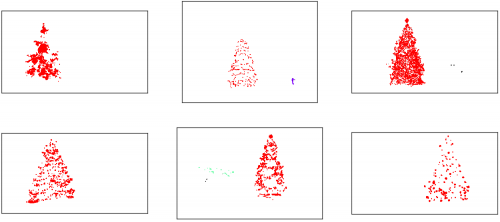
Jest kilka rzeczy, o których należy pamiętać, patrząc na ten wynik. Po pierwsze, DBSCAN wymaga od użytkownika ustawienia parametru "proximity" w celu regulacji jego zachowania, który skutecznie kontroluje, jak oddzielona musi być para punktów, aby algorytm mógł zadeklarować nowy oddzielny klaster, zamiast aglomerować punkt testowy na już wcześniej istniejący klaster. Ustawiłem tę wartość na 0.04 razy większy rozmiar wzdłuż przekątnej każdego obrazu. Od obrazy różnią się rozmiarem od mniej więcej VGA do około HD 1080, ten typ definicji względnej skali jest krytyczny.
Kolejną kwestią wartą odnotowania jest to, że algorytm DBSCAN zaimplementowany w scikit-learn ma ograniczenia pamięci, które są dość trudne dla niektórych większych obrazów w tej próbce. Dlatego dla kilku większych obrazów musiałem "zdziesiątkować" (tj. zachować tylko co 3 lub 4 piksel i upuścić Pozostałe) każdy klaster, aby pozostać w tym limicie. W wyniku tego procesu wycinania, Pozostałe pojedyncze nieliczne piksele są trudne do zobaczenia na niektórych większych obrazach. Dlatego tylko do celów wyświetlania piksele kodowane kolorami na powyższych obrazach zostały skutecznie "rozszerzone" tylko nieznacznie, aby lepiej się wyróżniały. Jest to czysto kosmetyczna operacja ze względu na narrację; chociaż są komentarze wspominające o tym dylatacji w moim kodzie, zapewniam, że nie ma to nic wspólnego z żadnymi obliczeniami, które w rzeczywistości Materia.
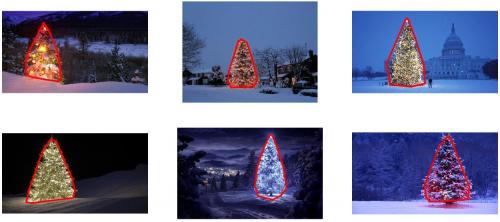
Gdy klastry zostaną zidentyfikowane i oznakowane, trzeci i ostatni krok jest łatwy: po prostu biorę największy klaster w każdym obrazie (w tym przypadku zdecydowałem się zmierzyć "rozmiar" pod względem całkowitej liczby pikseli prętów, chociaż można było równie łatwo zamiast tego użyć jakiegoś rodzaju metryki, która mierzy zasięg fizyczny) i obliczyć wypukły kadłub dla tego klastra. Wypukły kadłub staje się wtedy obramowaniem drzewa. Sześć wypukłych łusek obliczonych tą metodą przedstawiono poniżej w Czerwony:
Kod źródłowy jest napisany dla Pythona 2.7.6 i zależy od numpy, scipy, matplotlib i scikit-ucz się . Podzieliłem ją na dwie części. Pierwsza część odpowiada za rzeczywiste przetwarzanie obrazu:
from PIL import Image
import numpy as np
import scipy as sp
import matplotlib.colors as colors
from sklearn.cluster import DBSCAN
from math import ceil, sqrt
"""
Inputs:
rgbimg: [M,N,3] numpy array containing (uint, 0-255) color image
hueleftthr: Scalar constant to select maximum allowed hue in the
yellow-green region
huerightthr: Scalar constant to select minimum allowed hue in the
blue-purple region
satthr: Scalar constant to select minimum allowed saturation
valthr: Scalar constant to select minimum allowed value
monothr: Scalar constant to select minimum allowed monochrome
brightness
maxpoints: Scalar constant maximum number of pixels to forward to
the DBSCAN clustering algorithm
proxthresh: Proximity threshold to use for DBSCAN, as a fraction of
the diagonal size of the image
Outputs:
borderseg: [K,2,2] Nested list containing K pairs of x- and y- pixel
values for drawing the tree border
X: [P,2] List of pixels that passed the threshold step
labels: [Q,2] List of cluster labels for points in Xslice (see
below)
Xslice: [Q,2] Reduced list of pixels to be passed to DBSCAN
"""
def findtree(rgbimg, hueleftthr=0.2, huerightthr=0.95, satthr=0.7,
valthr=0.7, monothr=220, maxpoints=5000, proxthresh=0.04):
# Convert rgb image to monochrome for
gryimg = np.asarray(Image.fromarray(rgbimg).convert('L'))
# Convert rgb image (uint, 0-255) to hsv (float, 0.0-1.0)
hsvimg = colors.rgb_to_hsv(rgbimg.astype(float)/255)
# Initialize binary thresholded image
binimg = np.zeros((rgbimg.shape[0], rgbimg.shape[1]))
# Find pixels with hue<0.2 or hue>0.95 (red or yellow) and saturation/value
# both greater than 0.7 (saturated and bright)--tends to coincide with
# ornamental lights on trees in some of the images
boolidx = np.logical_and(
np.logical_and(
np.logical_or((hsvimg[:,:,0] < hueleftthr),
(hsvimg[:,:,0] > huerightthr)),
(hsvimg[:,:,1] > satthr)),
(hsvimg[:,:,2] > valthr))
# Find pixels that meet hsv criterion
binimg[np.where(boolidx)] = 255
# Add pixels that meet grayscale brightness criterion
binimg[np.where(gryimg > monothr)] = 255
# Prepare thresholded points for DBSCAN clustering algorithm
X = np.transpose(np.where(binimg == 255))
Xslice = X
nsample = len(Xslice)
if nsample > maxpoints:
# Make sure number of points does not exceed DBSCAN maximum capacity
Xslice = X[range(0,nsample,int(ceil(float(nsample)/maxpoints)))]
# Translate DBSCAN proximity threshold to units of pixels and run DBSCAN
pixproxthr = proxthresh * sqrt(binimg.shape[0]**2 + binimg.shape[1]**2)
db = DBSCAN(eps=pixproxthr, min_samples=10).fit(Xslice)
labels = db.labels_.astype(int)
# Find the largest cluster (i.e., with most points) and obtain convex hull
unique_labels = set(labels)
maxclustpt = 0
for k in unique_labels:
class_members = [index[0] for index in np.argwhere(labels == k)]
if len(class_members) > maxclustpt:
points = Xslice[class_members]
hull = sp.spatial.ConvexHull(points)
maxclustpt = len(class_members)
borderseg = [[points[simplex,0], points[simplex,1]] for simplex
in hull.simplices]
return borderseg, X, labels, Xslice
A druga część to skrypt na poziomie użytkownika, który wywołuje pierwszy plik i generuje wszystkie powyższe wykresy:
#!/usr/bin/env python
from PIL import Image
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.cm as cm
from findtree import findtree
# Image files to process
fname = ['nmzwj.png', 'aVZhC.png', '2K9EF.png',
'YowlH.png', '2y4o5.png', 'FWhSP.png']
# Initialize figures
fgsz = (16,7)
figthresh = plt.figure(figsize=fgsz, facecolor='w')
figclust = plt.figure(figsize=fgsz, facecolor='w')
figcltwo = plt.figure(figsize=fgsz, facecolor='w')
figborder = plt.figure(figsize=fgsz, facecolor='w')
figthresh.canvas.set_window_title('Thresholded HSV and Monochrome Brightness')
figclust.canvas.set_window_title('DBSCAN Clusters (Raw Pixel Output)')
figcltwo.canvas.set_window_title('DBSCAN Clusters (Slightly Dilated for Display)')
figborder.canvas.set_window_title('Trees with Borders')
for ii, name in zip(range(len(fname)), fname):
# Open the file and convert to rgb image
rgbimg = np.asarray(Image.open(name))
# Get the tree borders as well as a bunch of other intermediate values
# that will be used to illustrate how the algorithm works
borderseg, X, labels, Xslice = findtree(rgbimg)
# Display thresholded images
axthresh = figthresh.add_subplot(2,3,ii+1)
axthresh.set_xticks([])
axthresh.set_yticks([])
binimg = np.zeros((rgbimg.shape[0], rgbimg.shape[1]))
for v, h in X:
binimg[v,h] = 255
axthresh.imshow(binimg, interpolation='nearest', cmap='Greys')
# Display color-coded clusters
axclust = figclust.add_subplot(2,3,ii+1) # Raw version
axclust.set_xticks([])
axclust.set_yticks([])
axcltwo = figcltwo.add_subplot(2,3,ii+1) # Dilated slightly for display only
axcltwo.set_xticks([])
axcltwo.set_yticks([])
axcltwo.imshow(binimg, interpolation='nearest', cmap='Greys')
clustimg = np.ones(rgbimg.shape)
unique_labels = set(labels)
# Generate a unique color for each cluster
plcol = cm.rainbow_r(np.linspace(0, 1, len(unique_labels)))
for lbl, pix in zip(labels, Xslice):
for col, unqlbl in zip(plcol, unique_labels):
if lbl == unqlbl:
# Cluster label of -1 indicates no cluster membership;
# override default color with black
if lbl == -1:
col = [0.0, 0.0, 0.0, 1.0]
# Raw version
for ij in range(3):
clustimg[pix[0],pix[1],ij] = col[ij]
# Dilated just for display
axcltwo.plot(pix[1], pix[0], 'o', markerfacecolor=col,
markersize=1, markeredgecolor=col)
axclust.imshow(clustimg)
axcltwo.set_xlim(0, binimg.shape[1]-1)
axcltwo.set_ylim(binimg.shape[0], -1)
# Plot original images with read borders around the trees
axborder = figborder.add_subplot(2,3,ii+1)
axborder.set_axis_off()
axborder.imshow(rgbimg, interpolation='nearest')
for vseg, hseg in borderseg:
axborder.plot(hseg, vseg, 'r-', lw=3)
axborder.set_xlim(0, binimg.shape[1]-1)
axborder.set_ylim(binimg.shape[0], -1)
plt.show()
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2013-12-31 05:12:23
Edit NOTE: edytowałem ten post, aby (i) przetwarzać każdy obraz drzewa indywidualnie, zgodnie z wymaganiami, (ii) wziąć pod uwagę zarówno jasność obiektu, jak i kształt, aby poprawić jakość wyniku.
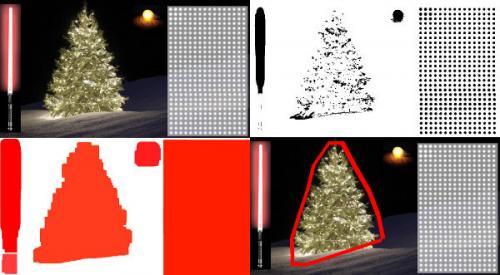
Poniżej przedstawiono podejście, które bierze pod uwagę jasność i kształt obiektu. Innymi słowy, poszukuje obiektów o kształcie trójkąta i znacznej jasności. Został zaimplementowany w Javie, przy użyciu przetwarzania obrazu ramy.
Pierwszym krokiem jest próg koloru. Celem jest skupienie analizy na obiektach o znacznej jasności.
Wyjście images:
Http://marvinproject.sourceforge.net/other/trees/tree_1threshold.png http://marvinproject.sourceforge.net/other/trees/tree_2threshold.png http://marvinproject.sourceforge.net/other/trees/tree_3threshold.png
{kind=link}
{kind=link}
{kind=link}
Http://marvinproject.sourceforge.net/other/trees/tree_4threshold.png http://marvinproject.sourceforge.net/other/trees/tree_5threshold.png http://marvinproject.sourceforge.net/other/trees/tree_6threshold.png
{kind=link}
{kind=link}
{kind=link}
Źródło kod:
public class ChristmasTree {
private MarvinImagePlugin fill = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.fill.boundaryFill");
private MarvinImagePlugin threshold = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.thresholding");
private MarvinImagePlugin invert = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.invert");
private MarvinImagePlugin dilation = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.morphological.dilation");
public ChristmasTree(){
MarvinImage tree;
// Iterate each image
for(int i=1; i<=6; i++){
tree = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
// 1. Threshold
threshold.setAttribute("threshold", 200);
threshold.process(tree.clone(), tree);
}
}
public static void main(String[] args) {
new ChristmasTree();
}
}
W drugim kroku najjaśniejsze punkty obrazu są rozszerzane w celu utworzenia kształtów. Efektem tego procesu jest prawdopodobny kształt obiektów o znacznej jasności. Stosując segmentację flood fill, wykrywane są odłączone kształty.
Wyjście images:
Http://marvinproject.sourceforge.net/other/trees/tree_1_fill.png http://marvinproject.sourceforge.net/other/trees/tree_2_fill.png http://marvinproject.sourceforge.net/other/trees/tree_3_fill.png
{kind=link}
{kind=link}
{kind=link}
Http://marvinproject.sourceforge.net/other/trees/tree_4_fill.png http://marvinproject.sourceforge.net/other/trees/tree_5_fill.png http://marvinproject.sourceforge.net/other/trees/tree_6_fill.png
{kind=link}
{kind=link}
{kind=link}
Źródło kod:
public class ChristmasTree {
private MarvinImagePlugin fill = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.fill.boundaryFill");
private MarvinImagePlugin threshold = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.thresholding");
private MarvinImagePlugin invert = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.invert");
private MarvinImagePlugin dilation = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.morphological.dilation");
public ChristmasTree(){
MarvinImage tree;
// Iterate each image
for(int i=1; i<=6; i++){
tree = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
// 1. Threshold
threshold.setAttribute("threshold", 200);
threshold.process(tree.clone(), tree);
// 2. Dilate
invert.process(tree.clone(), tree);
tree = MarvinColorModelConverter.rgbToBinary(tree, 127);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+i+"threshold.png");
dilation.setAttribute("matrix", MarvinMath.getTrueMatrix(50, 50));
dilation.process(tree.clone(), tree);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+1+"_dilation.png");
tree = MarvinColorModelConverter.binaryToRgb(tree);
// 3. Segment shapes
MarvinImage trees2 = tree.clone();
fill(tree, trees2);
MarvinImageIO.saveImage(trees2, "./res/trees/new/tree_"+i+"_fill.png");
}
private void fill(MarvinImage imageIn, MarvinImage imageOut){
boolean found;
int color= 0xFFFF0000;
while(true){
found=false;
Outerloop:
for(int y=0; y<imageIn.getHeight(); y++){
for(int x=0; x<imageIn.getWidth(); x++){
if(imageOut.getIntComponent0(x, y) == 0){
fill.setAttribute("x", x);
fill.setAttribute("y", y);
fill.setAttribute("color", color);
fill.setAttribute("threshold", 120);
fill.process(imageIn, imageOut);
color = newColor(color);
found = true;
break Outerloop;
}
}
}
if(!found){
break;
}
}
}
private int newColor(int color){
int red = (color & 0x00FF0000) >> 16;
int green = (color & 0x0000FF00) >> 8;
int blue = (color & 0x000000FF);
if(red <= green && red <= blue){
red+=5;
}
else if(green <= red && green <= blue){
green+=5;
}
else{
blue+=5;
}
return 0xFF000000 + (red << 16) + (green << 8) + blue;
}
public static void main(String[] args) {
new ChristmasTree();
}
}
Jak pokazano na obrazie wyjściowym, wykryto wiele kształtów. W tym problemie jest tylko kilka jasnych punktów na zdjęciach. Podejście to zostało jednak wdrożone w celu radzenia sobie z bardziej złożonymi scenariuszami.
W następnym kroku analizowany jest każdy kształt. Prosty algorytm wykrywa kształty o wzorze podobnym do trójkąta. Algorytm analizuje kształt obiektu linia po linii. Jeśli środek masy każdej linii kształtu jest prawie taki sam (biorąc pod uwagę próg) i wzrost masy wraz ze wzrostem y obiekt ma kształt trójkąta. Masa linii kształtu to liczba pikseli w tej linii, która należy do kształtu. Wyobraź sobie, że wycinasz obiekt w poziomie i analizujesz każdy segment poziomy. Jeśli są one scentralizowane względem siebie, a długość wzrasta od pierwszego segmentu do ostatniego we wzorze liniowym, prawdopodobnie masz obiekt, który przypomina trójkąt.
Kod źródłowy:
private int[] detectTrees(MarvinImage image){
HashSet<Integer> analysed = new HashSet<Integer>();
boolean found;
while(true){
found = false;
for(int y=0; y<image.getHeight(); y++){
for(int x=0; x<image.getWidth(); x++){
int color = image.getIntColor(x, y);
if(!analysed.contains(color)){
if(isTree(image, color)){
return getObjectRect(image, color);
}
analysed.add(color);
found=true;
}
}
}
if(!found){
break;
}
}
return null;
}
private boolean isTree(MarvinImage image, int color){
int mass[][] = new int[image.getHeight()][2];
int yStart=-1;
int xStart=-1;
for(int y=0; y<image.getHeight(); y++){
int mc = 0;
int xs=-1;
int xe=-1;
for(int x=0; x<image.getWidth(); x++){
if(image.getIntColor(x, y) == color){
mc++;
if(yStart == -1){
yStart=y;
xStart=x;
}
if(xs == -1){
xs = x;
}
if(x > xe){
xe = x;
}
}
}
mass[y][0] = xs;
mass[y][3] = xe;
mass[y][4] = mc;
}
int validLines=0;
for(int y=0; y<image.getHeight(); y++){
if
(
mass[y][5] > 0 &&
Math.abs(((mass[y][0]+mass[y][6])/2)-xStart) <= 50 &&
mass[y][7] >= (mass[yStart][8] + (y-yStart)*0.3) &&
mass[y][9] <= (mass[yStart][10] + (y-yStart)*1.5)
)
{
validLines++;
}
}
if(validLines > 100){
return true;
}
return false;
}
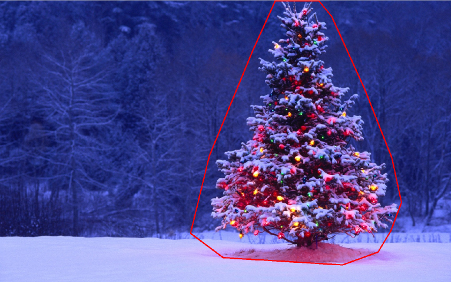
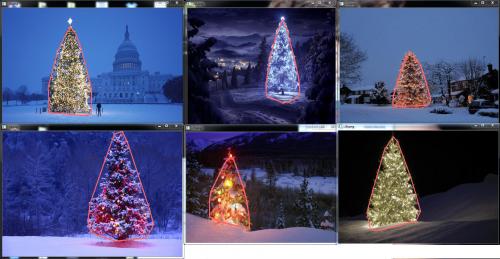
Wreszcie, pozycja każdego kształtu podobny do trójkąta i ze znaczną jasnością, w tym przypadku choinka, jest podświetlona na oryginalnym obrazie, jak pokazano poniżej.
Wynik końcowy images:
Http://marvinproject.sourceforge.net/other/trees/tree_1_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_2_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_3_out_2.jpg
{kind=link}
{kind=link}
{kind=link}
Http://marvinproject.sourceforge.net/other/trees/tree_4_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_5_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_6_out_2.jpg
{kind=link}
{kind=link}
{kind=link}
Finał kod źródłowy:
public class ChristmasTree {
private MarvinImagePlugin fill = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.fill.boundaryFill");
private MarvinImagePlugin threshold = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.thresholding");
private MarvinImagePlugin invert = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.invert");
private MarvinImagePlugin dilation = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.morphological.dilation");
public ChristmasTree(){
MarvinImage tree;
// Iterate each image
for(int i=1; i<=6; i++){
tree = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
// 1. Threshold
threshold.setAttribute("threshold", 200);
threshold.process(tree.clone(), tree);
// 2. Dilate
invert.process(tree.clone(), tree);
tree = MarvinColorModelConverter.rgbToBinary(tree, 127);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+i+"threshold.png");
dilation.setAttribute("matrix", MarvinMath.getTrueMatrix(50, 50));
dilation.process(tree.clone(), tree);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+1+"_dilation.png");
tree = MarvinColorModelConverter.binaryToRgb(tree);
// 3. Segment shapes
MarvinImage trees2 = tree.clone();
fill(tree, trees2);
MarvinImageIO.saveImage(trees2, "./res/trees/new/tree_"+i+"_fill.png");
// 4. Detect tree-like shapes
int[] rect = detectTrees(trees2);
// 5. Draw the result
MarvinImage original = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
drawBoundary(trees2, original, rect);
MarvinImageIO.saveImage(original, "./res/trees/new/tree_"+i+"_out_2.jpg");
}
}
private void drawBoundary(MarvinImage shape, MarvinImage original, int[] rect){
int yLines[] = new int[6];
yLines[0] = rect[1];
yLines[1] = rect[1]+(int)((rect[3]/5));
yLines[2] = rect[1]+((rect[3]/5)*2);
yLines[3] = rect[1]+((rect[3]/5)*3);
yLines[4] = rect[1]+(int)((rect[3]/5)*4);
yLines[5] = rect[1]+rect[3];
List<Point> points = new ArrayList<Point>();
for(int i=0; i<yLines.length; i++){
boolean in=false;
Point startPoint=null;
Point endPoint=null;
for(int x=rect[0]; x<rect[0]+rect[2]; x++){
if(shape.getIntColor(x, yLines[i]) != 0xFFFFFFFF){
if(!in){
if(startPoint == null){
startPoint = new Point(x, yLines[i]);
}
}
in = true;
}
else{
if(in){
endPoint = new Point(x, yLines[i]);
}
in = false;
}
}
if(endPoint == null){
endPoint = new Point((rect[0]+rect[2])-1, yLines[i]);
}
points.add(startPoint);
points.add(endPoint);
}
drawLine(points.get(0).x, points.get(0).y, points.get(1).x, points.get(1).y, 15, original);
drawLine(points.get(1).x, points.get(1).y, points.get(3).x, points.get(3).y, 15, original);
drawLine(points.get(3).x, points.get(3).y, points.get(5).x, points.get(5).y, 15, original);
drawLine(points.get(5).x, points.get(5).y, points.get(7).x, points.get(7).y, 15, original);
drawLine(points.get(7).x, points.get(7).y, points.get(9).x, points.get(9).y, 15, original);
drawLine(points.get(9).x, points.get(9).y, points.get(11).x, points.get(11).y, 15, original);
drawLine(points.get(11).x, points.get(11).y, points.get(10).x, points.get(10).y, 15, original);
drawLine(points.get(10).x, points.get(10).y, points.get(8).x, points.get(8).y, 15, original);
drawLine(points.get(8).x, points.get(8).y, points.get(6).x, points.get(6).y, 15, original);
drawLine(points.get(6).x, points.get(6).y, points.get(4).x, points.get(4).y, 15, original);
drawLine(points.get(4).x, points.get(4).y, points.get(2).x, points.get(2).y, 15, original);
drawLine(points.get(2).x, points.get(2).y, points.get(0).x, points.get(0).y, 15, original);
}
private void drawLine(int x1, int y1, int x2, int y2, int length, MarvinImage image){
int lx1, lx2, ly1, ly2;
for(int i=0; i<length; i++){
lx1 = (x1+i >= image.getWidth() ? (image.getWidth()-1)-i: x1);
lx2 = (x2+i >= image.getWidth() ? (image.getWidth()-1)-i: x2);
ly1 = (y1+i >= image.getHeight() ? (image.getHeight()-1)-i: y1);
ly2 = (y2+i >= image.getHeight() ? (image.getHeight()-1)-i: y2);
image.drawLine(lx1+i, ly1, lx2+i, ly2, Color.red);
image.drawLine(lx1, ly1+i, lx2, ly2+i, Color.red);
}
}
private void fillRect(MarvinImage image, int[] rect, int length){
for(int i=0; i<length; i++){
image.drawRect(rect[0]+i, rect[1]+i, rect[2]-(i*2), rect[3]-(i*2), Color.red);
}
}
private void fill(MarvinImage imageIn, MarvinImage imageOut){
boolean found;
int color= 0xFFFF0000;
while(true){
found=false;
Outerloop:
for(int y=0; y<imageIn.getHeight(); y++){
for(int x=0; x<imageIn.getWidth(); x++){
if(imageOut.getIntComponent0(x, y) == 0){
fill.setAttribute("x", x);
fill.setAttribute("y", y);
fill.setAttribute("color", color);
fill.setAttribute("threshold", 120);
fill.process(imageIn, imageOut);
color = newColor(color);
found = true;
break Outerloop;
}
}
}
if(!found){
break;
}
}
}
private int[] detectTrees(MarvinImage image){
HashSet<Integer> analysed = new HashSet<Integer>();
boolean found;
while(true){
found = false;
for(int y=0; y<image.getHeight(); y++){
for(int x=0; x<image.getWidth(); x++){
int color = image.getIntColor(x, y);
if(!analysed.contains(color)){
if(isTree(image, color)){
return getObjectRect(image, color);
}
analysed.add(color);
found=true;
}
}
}
if(!found){
break;
}
}
return null;
}
private boolean isTree(MarvinImage image, int color){
int mass[][] = new int[image.getHeight()][11];
int yStart=-1;
int xStart=-1;
for(int y=0; y<image.getHeight(); y++){
int mc = 0;
int xs=-1;
int xe=-1;
for(int x=0; x<image.getWidth(); x++){
if(image.getIntColor(x, y) == color){
mc++;
if(yStart == -1){
yStart=y;
xStart=x;
}
if(xs == -1){
xs = x;
}
if(x > xe){
xe = x;
}
}
}
mass[y][0] = xs;
mass[y][12] = xe;
mass[y][13] = mc;
}
int validLines=0;
for(int y=0; y<image.getHeight(); y++){
if
(
mass[y][14] > 0 &&
Math.abs(((mass[y][0]+mass[y][15])/2)-xStart) <= 50 &&
mass[y][16] >= (mass[yStart][17] + (y-yStart)*0.3) &&
mass[y][18] <= (mass[yStart][19] + (y-yStart)*1.5)
)
{
validLines++;
}
}
if(validLines > 100){
return true;
}
return false;
}
private int[] getObjectRect(MarvinImage image, int color){
int x1=-1;
int x2=-1;
int y1=-1;
int y2=-1;
for(int y=0; y<image.getHeight(); y++){
for(int x=0; x<image.getWidth(); x++){
if(image.getIntColor(x, y) == color){
if(x1 == -1 || x < x1){
x1 = x;
}
if(x2 == -1 || x > x2){
x2 = x;
}
if(y1 == -1 || y < y1){
y1 = y;
}
if(y2 == -1 || y > y2){
y2 = y;
}
}
}
}
return new int[]{x1, y1, (x2-x1), (y2-y1)};
}
private int newColor(int color){
int red = (color & 0x00FF0000) >> 16;
int green = (color & 0x0000FF00) >> 8;
int blue = (color & 0x000000FF);
if(red <= green && red <= blue){
red+=5;
}
else if(green <= red && green <= blue){
green+=30;
}
else{
blue+=30;
}
return 0xFF000000 + (red << 16) + (green << 8) + blue;
}
public static void main(String[] args) {
new ChristmasTree();
}
}
Zaletą tego podejścia jest fakt, że prawdopodobnie będzie ono działać z obrazami zawierającymi inne Świetliste obiekty, ponieważ analizuje kształt obiektu.
Wesołych Świąt!EDYTUJ NOTATKĘ 2
Istnieje dyskusja na temat podobieństwa obrazów wyjściowych tego rozwiązania i niektórych innych. W rzeczywistości są bardzo podobne. Ale to podejście nie tylko segmentuje obiekty. Analizuje również kształty obiektów w pewnym sensie. Informatyka może obsługiwać wiele świecących obiektów w tej samej scenie. W rzeczywistości choinka nie musi być najjaśniejsza. Przerywam to, żeby wzbogacić dyskusję. W próbkach jest błąd, który po prostu szuka najjaśniejszego obiektu, znajdziesz drzewa. Ale czy naprawdę chcemy przerwać dyskusję w tym momencie? W tym momencie, jak daleko komputer naprawdę rozpoznaje obiekt, który przypomina choinkę? Spróbujmy zamknąć tę lukę.
Poniżej przedstawiono wynik tylko dla wyjaśnienia tego punktu:
Input image
Wyjście
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2014-01-02 10:03:18
Oto moje proste i głupie rozwiązanie. Opiera się na założeniu, że drzewo będzie najjaśniejszą i największą rzeczą na zdjęciu.
//g++ -Wall -pedantic -ansi -O2 -pipe -s -o christmas_tree christmas_tree.cpp `pkg-config --cflags --libs opencv`
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc,char *argv[])
{
Mat original,tmp,tmp1;
vector <vector<Point> > contours;
Moments m;
Rect boundrect;
Point2f center;
double radius, max_area=0,tmp_area=0;
unsigned int j, k;
int i;
for(i = 1; i < argc; ++i)
{
original = imread(argv[i]);
if(original.empty())
{
cerr << "Error"<<endl;
return -1;
}
GaussianBlur(original, tmp, Size(3, 3), 0, 0, BORDER_DEFAULT);
erode(tmp, tmp, Mat(), Point(-1, -1), 10);
cvtColor(tmp, tmp, CV_BGR2HSV);
inRange(tmp, Scalar(0, 0, 0), Scalar(180, 255, 200), tmp);
dilate(original, tmp1, Mat(), Point(-1, -1), 15);
cvtColor(tmp1, tmp1, CV_BGR2HLS);
inRange(tmp1, Scalar(0, 185, 0), Scalar(180, 255, 255), tmp1);
dilate(tmp1, tmp1, Mat(), Point(-1, -1), 10);
bitwise_and(tmp, tmp1, tmp1);
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
tmp1 = Mat::zeros(original.size(),CV_8U);
approxPolyDP(contours[j], contours[j], 30, true);
drawContours(tmp1, contours, j, Scalar(255,255,255), CV_FILLED);
m = moments(contours[j]);
boundrect = boundingRect(contours[j]);
center = Point2f(m.m10/m.m00, m.m01/m.m00);
radius = (center.y - (boundrect.tl().y))/4.0*3.0;
Rect heightrect(center.x-original.cols/5, boundrect.tl().y, original.cols/5*2, boundrect.size().height);
tmp = Mat::zeros(original.size(), CV_8U);
rectangle(tmp, heightrect, Scalar(255, 255, 255), -1);
circle(tmp, center, radius, Scalar(255, 255, 255), -1);
bitwise_and(tmp, tmp1, tmp1);
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
approxPolyDP(contours[j], contours[j], 30, true);
convexHull(contours[j], contours[j]);
drawContours(original, contours, j, Scalar(0, 0, 255), 3);
namedWindow(argv[i], CV_WINDOW_NORMAL|CV_WINDOW_KEEPRATIO|CV_GUI_EXPANDED);
imshow(argv[i], original);
waitKey(0);
destroyWindow(argv[i]);
}
return 0;
}
GaussianBlur(original, tmp, Size(3, 3), 0, 0, BORDER_DEFAULT);
erode(tmp, tmp, Mat(), Point(-1, -1), 10);
cvtColor(tmp, tmp, CV_BGR2HSV);
inRange(tmp, Scalar(0, 0, 0), Scalar(180, 255, 200), tmp);
Wtedy znajdujemy każdy "jasny" piksel:
dilate(original, tmp1, Mat(), Point(-1, -1), 15);
cvtColor(tmp1, tmp1, CV_BGR2HLS);
inRange(tmp1, Scalar(0, 185, 0), Scalar(180, 255, 255), tmp1);
dilate(tmp1, tmp1, Mat(), Point(-1, -1), 10);
W końcu dołączamy do dwa wyniki:
bitwise_and(tmp, tmp1, tmp1);
Teraz szukamy największego jasnego obiektu:
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
tmp1 = Mat::zeros(original.size(),CV_8U);
approxPolyDP(contours[j], contours[j], 30, true);
drawContours(tmp1, contours, j, Scalar(255,255,255), CV_FILLED);
m = moments(contours[j]);
boundrect = boundingRect(contours[j]);
center = Point2f(m.m10/m.m00, m.m01/m.m00);
radius = (center.y - (boundrect.tl().y))/4.0*3.0;
Rect heightrect(center.x-original.cols/5, boundrect.tl().y, original.cols/5*2, boundrect.size().height);
tmp = Mat::zeros(original.size(), CV_8U);
rectangle(tmp, heightrect, Scalar(255, 255, 255), -1);
circle(tmp, center, radius, Scalar(255, 255, 255), -1);
bitwise_and(tmp, tmp1, tmp1);
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
approxPolyDP(contours[j], contours[j], 30, true);
convexHull(contours[j], contours[j]);
drawContours(original, contours, j, Scalar(0, 0, 255), 3);
Przepraszam, ale w tej chwili mam złe połączenie, więc nie jest to możliwe dla mnie, aby przesłać zdjęcia. Spróbuję to zrobić później.
Wesołych Świąt.EDIT:
Oto kilka zdjęć końcowego wyjścia:





Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2013-12-26 20:10:43
Kod napisałem w Matlab R2007a. użyłem k-means, aby z grubsza wyodrębnić choinkę. I pokaże mój wynik pośredni tylko z jednym obrazem, a wyniki końcowe ze wszystkimi sześcioma.
Po pierwsze, odwzorowałem przestrzeń RGB na przestrzeń laboratoryjną, co mogłoby zwiększyć kontrast czerwieni w kanale b:]}colorTransform = makecform('srgb2lab');
I = applycform(I, colorTransform);
L = double(I(:,:,1));
a = double(I(:,:,2));
b = double(I(:,:,3));
Oprócz funkcji w przestrzeni kolorów, użyłem również funkcji tekstury, która jest istotna z sąsiedztwo, a nie każdy piksel. Tutaj linearly łączyła intensywność z 3 oryginalne kanały (R, G, B). Powodem, dla którego sformatowałem w ten sposób, jest to, że święta drzewa na zdjęciu mają czerwone światła, a czasami zielone / czasami niebieskie oświetlenie również.
R=double(Irgb(:,:,1));
G=double(Irgb(:,:,2));
B=double(Irgb(:,:,3));
I0 = (3*R + max(G,B)-min(G,B))/2;
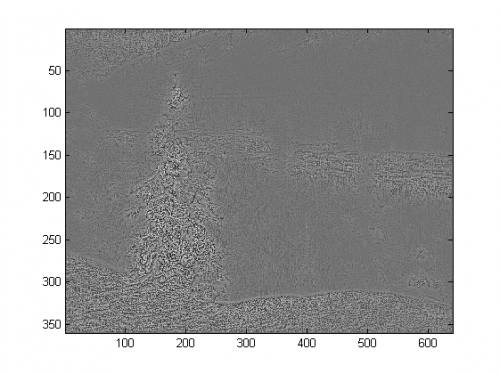
Zastosowałem lokalny wzór binarny 3X3 na I0, użyłem środkowego piksela jako progu i
uzyskany kontrast obliczając różnicę między średnią wartością intensywności pikseli
powyżej progu i wartości średniej poniżej to.
I0_copy = zeros(size(I0));
for i = 2 : size(I0,1) - 1
for j = 2 : size(I0,2) - 1
tmp = I0(i-1:i+1,j-1:j+1) >= I0(i,j);
I0_copy(i,j) = mean(mean(tmp.*I0(i-1:i+1,j-1:j+1))) - ...
mean(mean(~tmp.*I0(i-1:i+1,j-1:j+1))); % Contrast
end
end
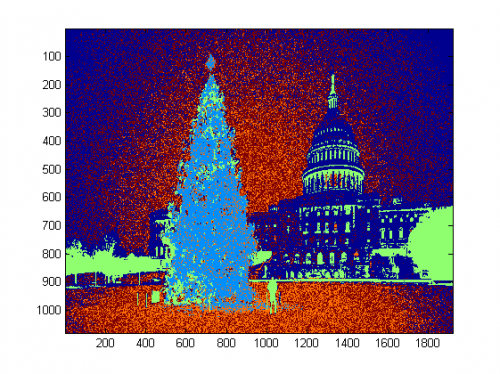
Ponieważ mam w sumie 4 funkcje, wybrałbym K = 5 w mojej metodzie klastrowania. Kod dla K-oznacza są pokazane poniżej (jest to z dr Andrew Ng uczenia maszynowego kurs. Wziąłem oczywiście wcześniej, a sam kod napisałem w jego zadaniu programistycznym).
[centroids, idx] = runkMeans(X, initial_centroids, max_iters);
mask=reshape(idx,img_size(1),img_size(2));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [centroids, idx] = runkMeans(X, initial_centroids, ...
max_iters, plot_progress)
[m n] = size(X);
K = size(initial_centroids, 1);
centroids = initial_centroids;
previous_centroids = centroids;
idx = zeros(m, 1);
for i=1:max_iters
% For each example in X, assign it to the closest centroid
idx = findClosestCentroids(X, centroids);
% Given the memberships, compute new centroids
centroids = computeCentroids(X, idx, K);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function idx = findClosestCentroids(X, centroids)
K = size(centroids, 1);
idx = zeros(size(X,1), 1);
for xi = 1:size(X,1)
x = X(xi, :);
% Find closest centroid for x.
best = Inf;
for mui = 1:K
mu = centroids(mui, :);
d = dot(x - mu, x - mu);
if d < best
best = d;
idx(xi) = mui;
end
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function centroids = computeCentroids(X, idx, K)
[m n] = size(X);
centroids = zeros(K, n);
for mui = 1:K
centroids(mui, :) = sum(X(idx == mui, :)) / sum(idx == mui);
end
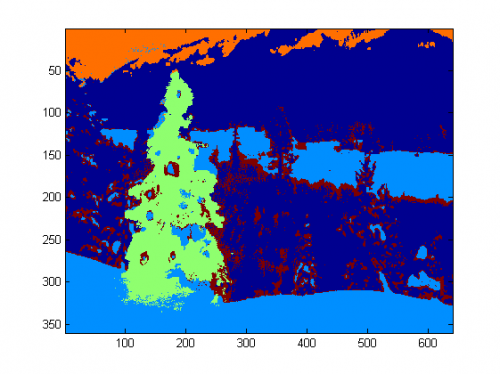




Ponieważ program działa bardzo wolno w moim komputerze, uruchomiłem 3 iteracje. Normalnie przystanek kryterium jest (i) czas iteracji co najmniej 10, lub (ii) brak zmian w centroidach. Na mój test, zwiększenie iteracji może różnicować tło (niebo i drzewo, niebo i budynek,..) dokładniej, ale nie wykazały drastycznych zmian w choince ekstrakcja. Zauważ również, że k-means nie jest odporny na losową inicjalizację centroid, dlatego zalecane jest kilkukrotne uruchomienie programu w celu dokonania porównania.
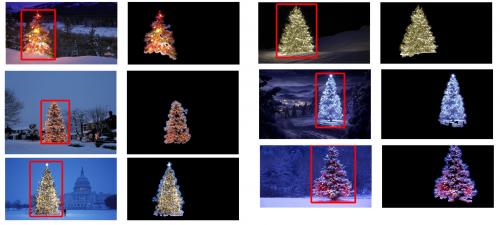
Po K-oznacza wybrano oznakowany region o maksymalnej intensywności I0. Oraz
granica śledzenie było używane do wyodrębniania granic. Dla mnie ostatnia choinka jest najtrudniejsza do wydobycia, ponieważ kontrast na tym zdjęciu nie jest wystarczająco wysoki, jak w pierwszej piątce. Inną kwestią w mojej metodzie jest to, że użyłem funkcji bwboundaries W Matlab do śledzenia granicy, ale czasami wewnętrzne granice są również uwzględnione, jak można zaobserwować w wynikach 3rd, 5th, 6th. Ciemna strona w choinkach nie tylko nie łączy się z oświetloną stroną, ale prowadzą również do tak wielu małych wewnętrznych granic (imfill nie poprawia się zbytnio). W całym moim algorytmie nadal ma dużo przestrzeni poprawy.






Niektóre} Publikacja s wskazuje, że przesunięcie średniej może być bardziej wytrzymałe niż K-oznacza, a wiele algorytmy oparte na wycinaniu Wykresów są również bardzo konkurencyjne na skomplikowanych granicach segmentacja. Sam napisałem algorytm mean-shift, wydaje się, że lepiej wyodrębnić regiony bez dość światła. Ale mean-shift jest trochę przesadnie segmentowany, a niektóre strategie potrzebne jest połączenie. Działał nawet dużo wolniej niż k-czyli w moim komputerze, obawiam się, że mam żeby się poddać. Z niecierpliwością czekam, aby inni przedstawili doskonałe wyniki tutaj z tymi nowoczesnymi algorytmami wymienionymi powyżej.
Jednak zawsze uważam, że wybór funkcji jest kluczowym elementem w segmentacji obrazów. Z odpowiedni wybór funkcji, który może zmaksymalizować margines między obiektem i tło, wiele algorytmy segmentacji na pewno zadziałają. Różne algorytmy mogą poprawić wynik od 1 do 10, ale wybór funkcji może poprawić go z 0 do 1.
Wesołych Świąt !Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2013-12-27 04:21:33
To jest mój ostatni post przy użyciu tradycyjnych metod przetwarzania obrazu...
Tutaj jakoś łączę moje dwie inne propozycje, osiągając jeszcze lepsze rezultaty . W rzeczywistości nie widzę, jak te wyniki mogą być lepsze (zwłaszcza jeśli spojrzeć na zamaskowane obrazy, które metoda produkuje).
Sercem podejścia jest połączenie trzech kluczowych założeń :
- obrazy powinny mieć duże wahania w drzewie regiony
- obrazy powinny mieć większą intensywność w regionach drzew
- obszary tła powinny mieć niską intensywność i być przeważnie niebieskie
Przy tych założeniach metoda działa następująco:
- Konwertuj obrazy na HSV
- Filtruj Kanał V za pomocą filtra LoG
- Zastosuj twardy próg na filtrowanym obrazie dziennika, aby uzyskać maskę "aktywności" A
- Zastosuj twardy próg do kanału V, aby uzyskać maskę intensywności B
- Zastosuj próg kanału H, aby uchwycić obszary niebieskie o niskiej intensywności w masce tła C
- Połącz maski używając i aby uzyskać ostateczną maskę
- Rozszerz maskę, aby powiększyć regiony i połączyć rozproszone piksele
- wyeliminuj małe regiony i uzyskaj ostateczną maskę, która ostatecznie będzie reprezentować tylko drzewo
Oto kod w Matlabie (znowu skrypt ładuje wszystkie obrazy jpg w bieżącym folderze i znowu nie jest to zoptymalizowany fragment kodu):
% clear everything
clear;
pack;
close all;
close all hidden;
drawnow;
clc;
% initialization
ims=dir('./*.jpg');
imgs={};
images={};
blur_images={};
log_image={};
dilated_image={};
int_image={};
back_image={};
bin_image={};
measurements={};
box={};
num=length(ims);
thres_div = 3;
for i=1:num,
% load original image
imgs{end+1}=imread(ims(i).name);
% convert to HSV colorspace
images{end+1}=rgb2hsv(imgs{i});
% apply laplacian filtering and heuristic hard thresholding
val_thres = (max(max(images{i}(:,:,3)))/thres_div);
log_image{end+1} = imfilter( images{i}(:,:,3),fspecial('log')) > val_thres;
% get the most bright regions of the image
int_thres = 0.26*max(max( images{i}(:,:,3)));
int_image{end+1} = images{i}(:,:,3) > int_thres;
% get the most probable background regions of the image
back_image{end+1} = images{i}(:,:,1)>(150/360) & images{i}(:,:,1)<(320/360) & images{i}(:,:,3)<0.5;
% compute the final binary image by combining
% high 'activity' with high intensity
bin_image{end+1} = logical( log_image{i}) & logical( int_image{i}) & ~logical( back_image{i});
% apply morphological dilation to connect distonnected components
strel_size = round(0.01*max(size(imgs{i}))); % structuring element for morphological dilation
dilated_image{end+1} = imdilate( bin_image{i}, strel('disk',strel_size));
% do some measurements to eliminate small objects
measurements{i} = regionprops( logical( dilated_image{i}),'Area','BoundingBox');
% iterative enlargement of the structuring element for better connectivity
while length(measurements{i})>14 && strel_size<(min(size(imgs{i}(:,:,1)))/2),
strel_size = round( 1.5 * strel_size);
dilated_image{i} = imdilate( bin_image{i}, strel('disk',strel_size));
measurements{i} = regionprops( logical( dilated_image{i}),'Area','BoundingBox');
end
for m=1:length(measurements{i})
if measurements{i}(m).Area < 0.05*numel( dilated_image{i})
dilated_image{i}( round(measurements{i}(m).BoundingBox(2):measurements{i}(m).BoundingBox(4)+measurements{i}(m).BoundingBox(2)),...
round(measurements{i}(m).BoundingBox(1):measurements{i}(m).BoundingBox(3)+measurements{i}(m).BoundingBox(1))) = 0;
end
end
% make sure the dilated image is the same size with the original
dilated_image{i} = dilated_image{i}(1:size(imgs{i},1),1:size(imgs{i},2));
% compute the bounding box
[y,x] = find( dilated_image{i});
if isempty( y)
box{end+1}=[];
else
box{end+1} = [ min(x) min(y) max(x)-min(x)+1 max(y)-min(y)+1];
end
end
%%% additional code to display things
for i=1:num,
figure;
subplot(121);
colormap gray;
imshow( imgs{i});
if ~isempty(box{i})
hold on;
rr = rectangle( 'position', box{i});
set( rr, 'EdgeColor', 'r');
hold off;
end
subplot(122);
imshow( imgs{i}.*uint8(repmat(dilated_image{i},[1 1 3])));
end
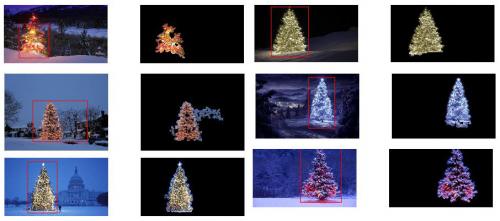
Wyniki
Wyniki wysokiej rozdzielczości wciąż dostępne tutaj!
Jeszcze więcej eksperymentów z dodatkowymi obrazami można znaleźć tutaj.
{kind=link}
{kind=link}
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2013-12-30 19:04:34
Moje kroki rozwiązania:
-
Get r channel ( Z RGB) - wszystkie operacje wykonywane na tym kanale:
-
Utwórz Region zainteresowania (ROI)
-
Kanał progowy R o wartości min. 149 (prawy górny obrazek)
-
Rozszerzenie obszaru wynikowego (środkowy lewy obraz)
-
-
Wykryj eges w obliczonym roi. Drzewo ma wiele krawędzi (środkowy prawy obrazek)
-
Wynik rozszerzania
-
Erode z większym promień (lewy dolny obrazek)
-
-
Wybierz największy (według obszaru) obiekt-jest to region wynikowy
-
ConvexHull (drzewo jest wielokątem wypukłym) (prawy dolny obrazek)
-
Bounding box (prawy dolny obrazek - grren box)
Krok po kroku:
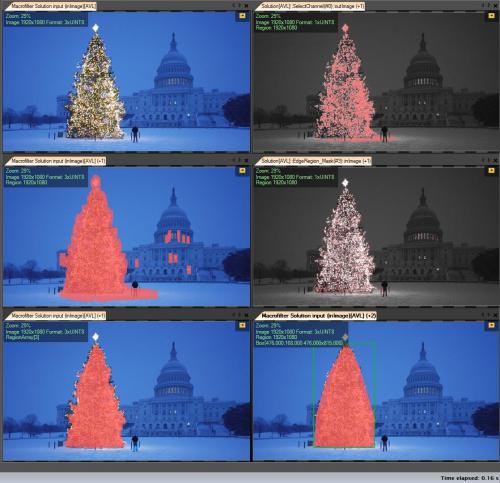
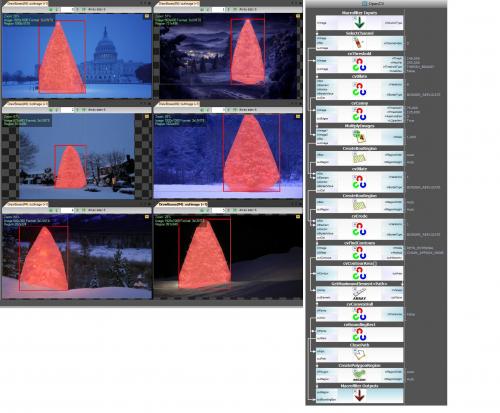
Pierwszy wynik-najprostszy, ale nie w oprogramowaniu open source - " Adaptive Vision Studio + Biblioteka Adaptive Vision": To nie jest open source, ale naprawdę szybko do "prototyp": {]}
Cały algorytm wykrywania choinki (11 bloków):
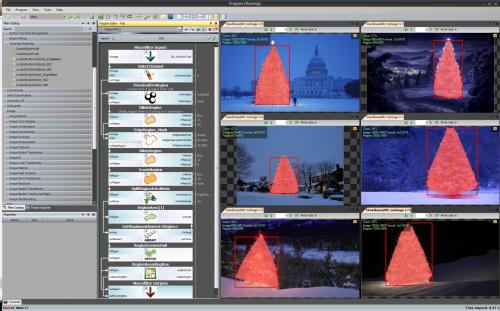
Następny krok. Chcemy rozwiązania open source. Zmień filtry AVL na Filtry OpenCV: Tutaj zrobiłem małe zmiany np. wykrywanie krawędzi użyj filtra cvCanny, aby respektować roi pomnożyłem obraz regionu z obrazem krawędzi, aby wybrać największy element użyłem findContours + contourArea ale idea jest to samo.
Https://www.youtube.com/watch?v=sfjB3MigLH0&index=1&list=UUpSRrkMHNHiLDXgylwhWNQQ
Nie mogę teraz pokazywać zdjęć z krokami pośrednimi, ponieważ mogę umieścić tylko 2 Linki.
Ok teraz używamy filtrów openSource, ale to nie jest cały open source. Ostatni krok-port do kodu c++. Używałem OpenCV w wersji 2.4.4
Wynikiem finalnego kodu c++ jest:
Kod C++ jest również dość krótki:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
#include <algorithm>
using namespace cv;
int main()
{
string images[6] = {"..\\1.png","..\\2.png","..\\3.png","..\\4.png","..\\5.png","..\\6.png"};
for(int i = 0; i < 6; ++i)
{
Mat img, thresholded, tdilated, tmp, tmp1;
vector<Mat> channels(3);
img = imread(images[i]);
split(img, channels);
threshold( channels[2], thresholded, 149, 255, THRESH_BINARY); //prepare ROI - threshold
dilate( thresholded, tdilated, getStructuringElement( MORPH_RECT, Size(22,22) ) ); //prepare ROI - dilate
Canny( channels[2], tmp, 75, 125, 3, true ); //Canny edge detection
multiply( tmp, tdilated, tmp1 ); // set ROI
dilate( tmp1, tmp, getStructuringElement( MORPH_RECT, Size(20,16) ) ); // dilate
erode( tmp, tmp1, getStructuringElement( MORPH_RECT, Size(36,36) ) ); // erode
vector<vector<Point> > contours, contours1(1);
vector<Point> convex;
vector<Vec4i> hierarchy;
findContours( tmp1, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
//get element of maximum area
//int bestID = std::max_element( contours.begin(), contours.end(),
// []( const vector<Point>& A, const vector<Point>& B ) { return contourArea(A) < contourArea(B); } ) - contours.begin();
int bestID = 0;
int bestArea = contourArea( contours[0] );
for( int i = 1; i < contours.size(); ++i )
{
int area = contourArea( contours[i] );
if( area > bestArea )
{
bestArea = area;
bestID = i;
}
}
convexHull( contours[bestID], contours1[0] );
drawContours( img, contours1, 0, Scalar( 100, 100, 255 ), img.rows / 100, 8, hierarchy, 0, Point() );
imshow("image", img );
waitKey(0);
}
return 0;
}
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2014-10-22 16:37:32
...inne Staromodne rozwiązanie-czysto oparte na przetwarzaniu HSV:
- Konwertuj obrazy do przestrzeni kolorów HSV
- tworzenie masek zgodnie z heurystyką w HSV (patrz niżej)
- Zastosuj dylatację morfologiczną do maski, aby połączyć odłączone obszary
- Odrzuć małe obszary i poziome bloki (pamiętaj, że drzewa są pionowymi blokami)
- Oblicz obwiednię
Słowo o heurystyce w HSV "przetwarzanie": {]}
- wszystko z odcieniami (H) między 210 - 320 stopni jest odrzucane jako niebiesko-magenta, która powinna być w tle lub w nieistotnych obszarach
- wszystko zwartościami (V) niższymi o 40% jest również odrzucane jako zbyt ciemne, aby było istotne
Oczywiście można eksperymentować z wieloma innymi możliwościami, aby dopracować to podejście...
Oto kod MATLAB do zrobienia sztuczki (uwaga: kod jest daleki od bycia zoptymalizowany!!! Użyłem technik nie zalecanych do programowania MATLAB tylko po to, aby móc śledzić wszystko w procesie-można to znacznie zoptymalizować): {]}
% clear everything
clear;
pack;
close all;
close all hidden;
drawnow;
clc;
% initialization
ims=dir('./*.jpg');
num=length(ims);
imgs={};
hsvs={};
masks={};
dilated_images={};
measurements={};
boxs={};
for i=1:num,
% load original image
imgs{end+1} = imread(ims(i).name);
flt_x_size = round(size(imgs{i},2)*0.005);
flt_y_size = round(size(imgs{i},1)*0.005);
flt = fspecial( 'average', max( flt_y_size, flt_x_size));
imgs{i} = imfilter( imgs{i}, flt, 'same');
% convert to HSV colorspace
hsvs{end+1} = rgb2hsv(imgs{i});
% apply a hard thresholding and binary operation to construct the mask
masks{end+1} = medfilt2( ~(hsvs{i}(:,:,1)>(210/360) & hsvs{i}(:,:,1)<(320/360))&hsvs{i}(:,:,3)>0.4);
% apply morphological dilation to connect distonnected components
strel_size = round(0.03*max(size(imgs{i}))); % structuring element for morphological dilation
dilated_images{end+1} = imdilate( masks{i}, strel('disk',strel_size));
% do some measurements to eliminate small objects
measurements{i} = regionprops( dilated_images{i},'Perimeter','Area','BoundingBox');
for m=1:length(measurements{i})
if (measurements{i}(m).Area < 0.02*numel( dilated_images{i})) || (measurements{i}(m).BoundingBox(3)>1.2*measurements{i}(m).BoundingBox(4))
dilated_images{i}( round(measurements{i}(m).BoundingBox(2):measurements{i}(m).BoundingBox(4)+measurements{i}(m).BoundingBox(2)),...
round(measurements{i}(m).BoundingBox(1):measurements{i}(m).BoundingBox(3)+measurements{i}(m).BoundingBox(1))) = 0;
end
end
dilated_images{i} = dilated_images{i}(1:size(imgs{i},1),1:size(imgs{i},2));
% compute the bounding box
[y,x] = find( dilated_images{i});
if isempty( y)
boxs{end+1}=[];
else
boxs{end+1} = [ min(x) min(y) max(x)-min(x)+1 max(y)-min(y)+1];
end
end
%%% additional code to display things
for i=1:num,
figure;
subplot(121);
colormap gray;
imshow( imgs{i});
if ~isempty(boxs{i})
hold on;
rr = rectangle( 'position', boxs{i});
set( rr, 'EdgeColor', 'r');
hold off;
end
subplot(122);
imshow( imgs{i}.*uint8(repmat(dilated_images{i},[1 1 3])));
end
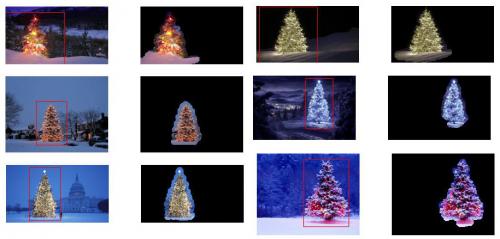
Wyniki:
W wynikach pokazuję zamaskowany obraz i obwiednię.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2013-12-27 18:40:32
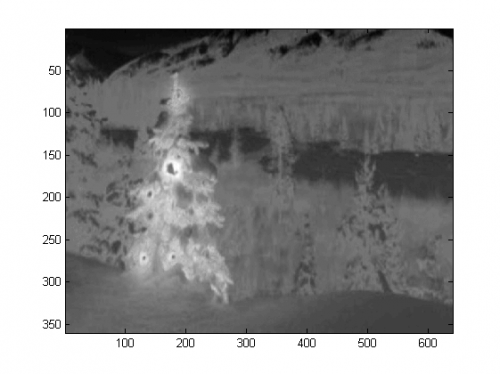
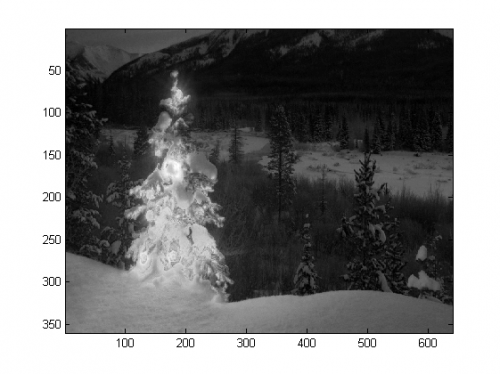
Niektóre Staromodne podejście do przetwarzania obrazu...
Pomysł opiera się na założeniu, że obrazy przedstawiają oświetlone drzewa na typowo ciemniejszym i gładszym tle (lub w niektórych przypadkach na przednim tle). Oświetlony obszar drzewa jest bardziej "energetyczny" i ma większą intensywność .
Proces wygląda następująco:
- Konwertuj na poziom szarości
- Zastosuj filtrowanie logów, aby uzyskać najbardziej "aktywne" obszary
- Zastosuj intensywny próg, aby uzyskać najbardziej jasny obszary
- Połącz poprzednie 2, aby uzyskać wstępną maskę
- Zastosuj dylatację morfologiczną, aby powiększyć obszary i połączyć sąsiednie komponenty
- eliminacja małych obszarów kandydujących zgodnie z ich rozmiarem
Otrzymujesz maskę binarną i obwiednię dla każdego obrazu.
Oto wyniki za pomocą tej naiwnej techniki:
Kod na Matlabie: Kod działa na folderze z obrazami JPG. Ładuje wszystkie obrazy i zwroty wykrytych wyników.
% clear everything
clear;
pack;
close all;
close all hidden;
drawnow;
clc;
% initialization
ims=dir('./*.jpg');
imgs={};
images={};
blur_images={};
log_image={};
dilated_image={};
int_image={};
bin_image={};
measurements={};
box={};
num=length(ims);
thres_div = 3;
for i=1:num,
% load original image
imgs{end+1}=imread(ims(i).name);
% convert to grayscale
images{end+1}=rgb2gray(imgs{i});
% apply laplacian filtering and heuristic hard thresholding
val_thres = (max(max(images{i}))/thres_div);
log_image{end+1} = imfilter( images{i},fspecial('log')) > val_thres;
% get the most bright regions of the image
int_thres = 0.26*max(max( images{i}));
int_image{end+1} = images{i} > int_thres;
% compute the final binary image by combining
% high 'activity' with high intensity
bin_image{end+1} = log_image{i} .* int_image{i};
% apply morphological dilation to connect distonnected components
strel_size = round(0.01*max(size(imgs{i}))); % structuring element for morphological dilation
dilated_image{end+1} = imdilate( bin_image{i}, strel('disk',strel_size));
% do some measurements to eliminate small objects
measurements{i} = regionprops( logical( dilated_image{i}),'Area','BoundingBox');
for m=1:length(measurements{i})
if measurements{i}(m).Area < 0.05*numel( dilated_image{i})
dilated_image{i}( round(measurements{i}(m).BoundingBox(2):measurements{i}(m).BoundingBox(4)+measurements{i}(m).BoundingBox(2)),...
round(measurements{i}(m).BoundingBox(1):measurements{i}(m).BoundingBox(3)+measurements{i}(m).BoundingBox(1))) = 0;
end
end
% make sure the dilated image is the same size with the original
dilated_image{i} = dilated_image{i}(1:size(imgs{i},1),1:size(imgs{i},2));
% compute the bounding box
[y,x] = find( dilated_image{i});
if isempty( y)
box{end+1}=[];
else
box{end+1} = [ min(x) min(y) max(x)-min(x)+1 max(y)-min(y)+1];
end
end
%%% additional code to display things
for i=1:num,
figure;
subplot(121);
colormap gray;
imshow( imgs{i});
if ~isempty(box{i})
hold on;
rr = rectangle( 'position', box{i});
set( rr, 'EdgeColor', 'r');
hold off;
end
subplot(122);
imshow( imgs{i}.*uint8(repmat(dilated_image{i},[1 1 3])));
end
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2013-12-30 13:56:50
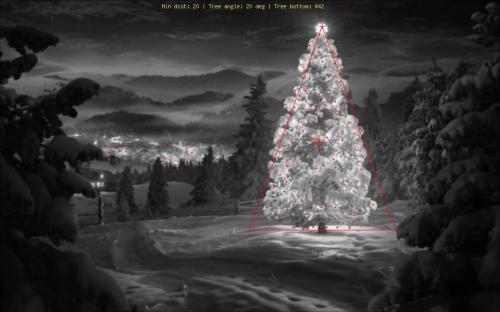
Używając zupełnie innego podejścia niż to, co widziałem, stworzyłemskrypt php , który wykrywa choinki po ich światłach. Rezultatem jest zawsze symetryczny trójkąt, a w razie potrzeby wartości liczbowe, takie jak kąt ("fatness") drzewa.
Największym zagrożeniem dla tego algorytmu są oczywiście światła obok (w dużych ilościach) lub przed drzewem (większy problem do dalszej optymalizacji). Edit (added): What it can ' t do: Dowiedz się czy jest choinka lub nie, Znajdź wiele choinek na jednym obrazie, poprawnie Wykryj choinkę cristmas w środku Las Vegas, Wykryj choinki, które są mocno wygięte, do góry nogami lub pocięte w dół... ;)
Poszczególne etapy to:
- Oblicz dodaną jasność (R + G + B) dla każdego piksela
- Dodaj tę wartość wszystkich 8 sąsiadujących pikseli na górze każdego piksela
- uszereguj wszystkie piksele według tej wartości ( najpierw najjaśniejsze) - wiem, niezbyt subtelne...
- Wybierz N Z te, zaczynając od góry, pomijając te, które są zbyt blisko
- Oblicz medianę tych wierzchołków N (daje nam przybliżony środek drzewa) [10]}Zacznij od środkowej pozycji w górę w rozszerzającej wiązce wyszukiwania dla najwyższego światła z wybranych najjaśniejszych (ludzie mają tendencję do umieszczania co najmniej jednego światła na samym szczycie) {11]}
- stamtąd wyobraź sobie linie idące o 60 stopni w lewo i w prawo w dół (choinki nie powinny być tak grube)
- zmniejszenie te 60 stopni, aż 20% najjaśniejszych świateł znajduje się poza tym trójkątem Znajdźcie światło na samym dole trójkąta, co daje dolną poziomą granicę drzewa.]}
- zrobione
Wyjaśnienie oznaczeń:
- Duży Czerwony Krzyż w środku drzewa: Mediana górnej N najjaśniejszych świateł
- Linia przerywana stamtąd w górę: "Szukaj belki" dla wierzchołka drzewa
- mniejszy Czerwony Krzyż: wierzchołek drzewa
- naprawdę małe czerwone Krzyże: wszystkie górne N najjaśniejsze światła
- czerwony trójkąt: D ' uh!
Kod źródłowy:
<?php
ini_set('memory_limit', '1024M');
header("Content-type: image/png");
$chosenImage = 6;
switch($chosenImage){
case 1:
$inputImage = imagecreatefromjpeg("nmzwj.jpg");
break;
case 2:
$inputImage = imagecreatefromjpeg("2y4o5.jpg");
break;
case 3:
$inputImage = imagecreatefromjpeg("YowlH.jpg");
break;
case 4:
$inputImage = imagecreatefromjpeg("2K9Ef.jpg");
break;
case 5:
$inputImage = imagecreatefromjpeg("aVZhC.jpg");
break;
case 6:
$inputImage = imagecreatefromjpeg("FWhSP.jpg");
break;
case 7:
$inputImage = imagecreatefromjpeg("roemerberg.jpg");
break;
default:
exit();
}
// Process the loaded image
$topNspots = processImage($inputImage);
imagejpeg($inputImage);
imagedestroy($inputImage);
// Here be functions
function processImage($image) {
$orange = imagecolorallocate($image, 220, 210, 60);
$black = imagecolorallocate($image, 0, 0, 0);
$red = imagecolorallocate($image, 255, 0, 0);
$maxX = imagesx($image)-1;
$maxY = imagesy($image)-1;
// Parameters
$spread = 1; // Number of pixels to each direction that will be added up
$topPositions = 80; // Number of (brightest) lights taken into account
$minLightDistance = round(min(array($maxX, $maxY)) / 30); // Minimum number of pixels between the brigtests lights
$searchYperX = 5; // spread of the "search beam" from the median point to the top
$renderStage = 3; // 1 to 3; exits the process early
// STAGE 1
// Calculate the brightness of each pixel (R+G+B)
$maxBrightness = 0;
$stage1array = array();
for($row = 0; $row <= $maxY; $row++) {
$stage1array[$row] = array();
for($col = 0; $col <= $maxX; $col++) {
$rgb = imagecolorat($image, $col, $row);
$brightness = getBrightnessFromRgb($rgb);
$stage1array[$row][$col] = $brightness;
if($renderStage == 1){
$brightnessToGrey = round($brightness / 765 * 256);
$greyRgb = imagecolorallocate($image, $brightnessToGrey, $brightnessToGrey, $brightnessToGrey);
imagesetpixel($image, $col, $row, $greyRgb);
}
if($brightness > $maxBrightness) {
$maxBrightness = $brightness;
if($renderStage == 1){
imagesetpixel($image, $col, $row, $red);
}
}
}
}
if($renderStage == 1) {
return;
}
// STAGE 2
// Add up brightness of neighbouring pixels
$stage2array = array();
$maxStage2 = 0;
for($row = 0; $row <= $maxY; $row++) {
$stage2array[$row] = array();
for($col = 0; $col <= $maxX; $col++) {
if(!isset($stage2array[$row][$col])) $stage2array[$row][$col] = 0;
// Look around the current pixel, add brightness
for($y = $row-$spread; $y <= $row+$spread; $y++) {
for($x = $col-$spread; $x <= $col+$spread; $x++) {
// Don't read values from outside the image
if($x >= 0 && $x <= $maxX && $y >= 0 && $y <= $maxY){
$stage2array[$row][$col] += $stage1array[$y][$x]+10;
}
}
}
$stage2value = $stage2array[$row][$col];
if($stage2value > $maxStage2) {
$maxStage2 = $stage2value;
}
}
}
if($renderStage >= 2){
// Paint the accumulated light, dimmed by the maximum value from stage 2
for($row = 0; $row <= $maxY; $row++) {
for($col = 0; $col <= $maxX; $col++) {
$brightness = round($stage2array[$row][$col] / $maxStage2 * 255);
$greyRgb = imagecolorallocate($image, $brightness, $brightness, $brightness);
imagesetpixel($image, $col, $row, $greyRgb);
}
}
}
if($renderStage == 2) {
return;
}
// STAGE 3
// Create a ranking of bright spots (like "Top 20")
$topN = array();
for($row = 0; $row <= $maxY; $row++) {
for($col = 0; $col <= $maxX; $col++) {
$stage2Brightness = $stage2array[$row][$col];
$topN[$col.":".$row] = $stage2Brightness;
}
}
arsort($topN);
$topNused = array();
$topPositionCountdown = $topPositions;
if($renderStage == 3){
foreach ($topN as $key => $val) {
if($topPositionCountdown <= 0){
break;
}
$position = explode(":", $key);
foreach($topNused as $usedPosition => $usedValue) {
$usedPosition = explode(":", $usedPosition);
$distance = abs($usedPosition[0] - $position[0]) + abs($usedPosition[1] - $position[1]);
if($distance < $minLightDistance) {
continue 2;
}
}
$topNused[$key] = $val;
paintCrosshair($image, $position[0], $position[1], $red, 2);
$topPositionCountdown--;
}
}
// STAGE 4
// Median of all Top N lights
$topNxValues = array();
$topNyValues = array();
foreach ($topNused as $key => $val) {
$position = explode(":", $key);
array_push($topNxValues, $position[0]);
array_push($topNyValues, $position[1]);
}
$medianXvalue = round(calculate_median($topNxValues));
$medianYvalue = round(calculate_median($topNyValues));
paintCrosshair($image, $medianXvalue, $medianYvalue, $red, 15);
// STAGE 5
// Find treetop
$filename = 'debug.log';
$handle = fopen($filename, "w");
fwrite($handle, "\n\n STAGE 5");
$treetopX = $medianXvalue;
$treetopY = $medianYvalue;
$searchXmin = $medianXvalue;
$searchXmax = $medianXvalue;
$width = 0;
for($y = $medianYvalue; $y >= 0; $y--) {
fwrite($handle, "\nAt y = ".$y);
if(($y % $searchYperX) == 0) { // Modulo
$width++;
$searchXmin = $medianXvalue - $width;
$searchXmax = $medianXvalue + $width;
imagesetpixel($image, $searchXmin, $y, $red);
imagesetpixel($image, $searchXmax, $y, $red);
}
foreach ($topNused as $key => $val) {
$position = explode(":", $key); // "x:y"
if($position[1] != $y){
continue;
}
if($position[0] >= $searchXmin && $position[0] <= $searchXmax){
$treetopX = $position[0];
$treetopY = $y;
}
}
}
paintCrosshair($image, $treetopX, $treetopY, $red, 5);
// STAGE 6
// Find tree sides
fwrite($handle, "\n\n STAGE 6");
$treesideAngle = 60; // The extremely "fat" end of a christmas tree
$treeBottomY = $treetopY;
$topPositionsExcluded = 0;
$xymultiplier = 0;
while(($topPositionsExcluded < ($topPositions / 5)) && $treesideAngle >= 1){
fwrite($handle, "\n\nWe're at angle ".$treesideAngle);
$xymultiplier = sin(deg2rad($treesideAngle));
fwrite($handle, "\nMultiplier: ".$xymultiplier);
$topPositionsExcluded = 0;
foreach ($topNused as $key => $val) {
$position = explode(":", $key);
fwrite($handle, "\nAt position ".$key);
if($position[1] > $treeBottomY) {
$treeBottomY = $position[1];
}
// Lights above the tree are outside of it, but don't matter
if($position[1] < $treetopY){
$topPositionsExcluded++;
fwrite($handle, "\nTOO HIGH");
continue;
}
// Top light will generate division by zero
if($treetopY-$position[1] == 0) {
fwrite($handle, "\nDIVISION BY ZERO");
continue;
}
// Lights left end right of it are also not inside
fwrite($handle, "\nLight position factor: ".(abs($treetopX-$position[0]) / abs($treetopY-$position[1])));
if((abs($treetopX-$position[0]) / abs($treetopY-$position[1])) > $xymultiplier){
$topPositionsExcluded++;
fwrite($handle, "\n --- Outside tree ---");
}
}
$treesideAngle--;
}
fclose($handle);
// Paint tree's outline
$treeHeight = abs($treetopY-$treeBottomY);
$treeBottomLeft = 0;
$treeBottomRight = 0;
$previousState = false; // line has not started; assumes the tree does not "leave"^^
for($x = 0; $x <= $maxX; $x++){
if(abs($treetopX-$x) != 0 && abs($treetopX-$x) / $treeHeight > $xymultiplier){
if($previousState == true){
$treeBottomRight = $x;
$previousState = false;
}
continue;
}
imagesetpixel($image, $x, $treeBottomY, $red);
if($previousState == false){
$treeBottomLeft = $x;
$previousState = true;
}
}
imageline($image, $treeBottomLeft, $treeBottomY, $treetopX, $treetopY, $red);
imageline($image, $treeBottomRight, $treeBottomY, $treetopX, $treetopY, $red);
// Print out some parameters
$string = "Min dist: ".$minLightDistance." | Tree angle: ".$treesideAngle." deg | Tree bottom: ".$treeBottomY;
$px = (imagesx($image) - 6.5 * strlen($string)) / 2;
imagestring($image, 2, $px, 5, $string, $orange);
return $topN;
}
/**
* Returns values from 0 to 765
*/
function getBrightnessFromRgb($rgb) {
$r = ($rgb >> 16) & 0xFF;
$g = ($rgb >> 8) & 0xFF;
$b = $rgb & 0xFF;
return $r+$r+$b;
}
function paintCrosshair($image, $posX, $posY, $color, $size=5) {
for($x = $posX-$size; $x <= $posX+$size; $x++) {
if($x>=0 && $x < imagesx($image)){
imagesetpixel($image, $x, $posY, $color);
}
}
for($y = $posY-$size; $y <= $posY+$size; $y++) {
if($y>=0 && $y < imagesy($image)){
imagesetpixel($image, $posX, $y, $color);
}
}
}
// From http://www.mdj.us/web-development/php-programming/calculating-the-median-average-values-of-an-array-with-php/
function calculate_median($arr) {
sort($arr);
$count = count($arr); //total numbers in array
$middleval = floor(($count-1)/2); // find the middle value, or the lowest middle value
if($count % 2) { // odd number, middle is the median
$median = $arr[$middleval];
} else { // even number, calculate avg of 2 medians
$low = $arr[$middleval];
$high = $arr[$middleval+1];
$median = (($low+$high)/2);
}
return $median;
}
?>
Images:





Bonus: Niemiecki Weihnachtsbaum z Wikipedii
 http://commons.wikimedia.org/wiki/File:Weihnachtsbaum_R%C3%B6merberg.jpg
http://commons.wikimedia.org/wiki/File:Weihnachtsbaum_R%C3%B6merberg.jpg
{kind=link}
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2014-01-02 23:55:14
Używałem Pythona z opencv.
Mój algorytm wygląda tak:
- najpierw pobiera czerwony kanał z obrazka
- Zastosuj próg (wartość min. 200) do czerwonego kanału
- następnie zastosuj Gradient morfologiczny, a następnie wykonaj "Zamknięcie" (dylatację, a następnie erozję)
- Następnie znajduje kontury w płaszczyźnie i wybiera najdłuższy kontur.

Kod:
import numpy as np
import cv2
import copy
def findTree(image,num):
im = cv2.imread(image)
im = cv2.resize(im, (400,250))
gray = cv2.cvtColor(im, cv2.COLOR_RGB2GRAY)
imf = copy.deepcopy(im)
b,g,r = cv2.split(im)
minR = 200
_,thresh = cv2.threshold(r,minR,255,0)
kernel = np.ones((25,5))
dst = cv2.morphologyEx(thresh, cv2.MORPH_GRADIENT, kernel)
dst = cv2.morphologyEx(dst, cv2.MORPH_CLOSE, kernel)
contours = cv2.findContours(dst,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)[0]
cv2.drawContours(im, contours,-1, (0,255,0), 1)
maxI = 0
for i in range(len(contours)):
if len(contours[maxI]) < len(contours[i]):
maxI = i
img = copy.deepcopy(r)
cv2.polylines(img,[contours[maxI]],True,(255,255,255),3)
imf[:,:,2] = img
cv2.imshow(str(num), imf)
def main():
findTree('tree.jpg',1)
findTree('tree2.jpg',2)
findTree('tree3.jpg',3)
findTree('tree4.jpg',4)
findTree('tree5.jpg',5)
findTree('tree6.jpg',6)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
Jeśli zmienię jądro z (25,5) na (10,5)
I get lepsze wyniki na wszystkich drzewach, ale na dole po lewej,

Mój algorytm zakłada, że drzewo ma na sobie światła i w lewym dolnym drzewie górna ma mniej światła niż pozostałe.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2014-01-30 21:46:58