wyodrębnienie obrazu czworobocznego na prostokąt

BOUNTY UPDATE
Po linku Denis ' s , Oto jak używać threeblindmiceandamonkey kod:
// the destination rect is our 'in' quad
int dw = 300, dh = 250;
double in[4][4] = {{0,0},{dw,0},{dw,dh},{0,dh}};
// the quad in the source image is our 'out'
double out[4][5] = {{171,72},{331,93},{333,188},{177,210}};
double homo[3][6];
const int ret = mapQuadToQuad(in,out,homo);
// homo can be used for calculating the x,y of any destination point
// in the source, e.g.
for(int i=0; i<4; i++) {
double p1[3] = {out[i][0],out[i][7],1};
double p2[3];
transformMatrix(p1,p2,homo);
p2[0] /= p2[2]; // x
p2[1] /= p2[2]; // y
printf("\t%2.2f\t%2.2f\n",p2[0],p2[1]);
}
To zapewnia transformatę do konwersji punktów w miejscu docelowym na źródło - możesz oczywiście zrobić to na odwrót, ale jest schludnie, aby móc to zrobić dla mieszania:
for(int y=0; y<dh; y++) {
for(int x=0; x<dw; x++) {
// calc the four corners in source for this
// destination pixel, and mix
Do miksowania używam super-samplingu z przypadkowymi punktami; działa bardzo dobrze, nawet gdy jest duża rozbieżność w obszarze źródłowym i docelowym
PYTANIE OGÓLNE
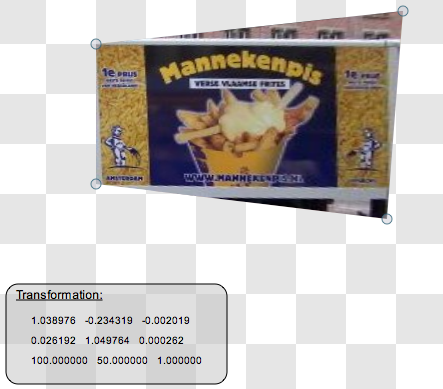
Na zdjęciu u góry, znak z boku furgonetki nie jest zwrócony twarzą do kamery. Chcę obliczyć, najlepiej jak potrafię z pikselami, jakie mam, jak to będzie wyglądać twarzą na.
Znam współrzędne narożnika kwadratu na obrazku i rozmiar docelowego prostokąta.
Wyobrażam sobie, że jest to jakaś Pętla przez oś x i y robiąca Linia bresenhama na obu wymiarach jednocześnie z jakimś mieszaniem, ponieważ piksele w obrazie źródłowym i docelowym nakładają się na siebie - jakieś miksowanie subpikseli?
Jakie są podejścia i jak wymieszać piksele?
Czy istnieje standardowe podejście do tego?
3 answers
Spójrz w górę "quad to quad" transform, np.
threeblindmiceandamonkey .
Transformata 3x3 na współrzędnych jednorodnych 2D może przekształcić dowolne 4 punkty (kwadrat)
do każdego innego quada;
odwrotnie, dowolne fromquad i toquad, takie jak rogi ciężarówki i prostokąt docelowy,
daj transformację 3 x 3.
Qt ma quadToQuad
i można przekształcić pixmapy z nim, ale chyba nie masz Qt ?
Dodano 10.01.2012:
od labs.trolltech.com/page/Graphics/Examples
jest fajne demo które quad-to-quads a pixmap as you move the corners:
Dodano 11.01.2012 @Will, tu masz tłumaczenie.h w Pythonie (który znasz trochę ?
""" ..."""są komentarzami wielowierszowymi.)perstrans() jest kluczem; nadzieja, że ma sens, jeśli nie zapytać.
Bytheway, you could map the pixels one by one, mapQuadToQuad( target rect, oryg quad ), ale bez interpolacji pikseli będzie to wyglądało okropnie; OpenCV robi to wszystko.
#!/usr/bin/env python
""" square <-> quad maps
from http://threeblindmiceandamonkey.com/?p=16 matrix.h
"""
from __future__ import division
import numpy as np
__date__ = "2010-06-11 jun denis"
def det2(a, b, c, d):
return a*d - b*c
def mapSquareToQuad( quad ): # [4][2]
SQ = np.zeros((3,3))
px = quad[0,0] - quad[1,0] + quad[2,0] - quad[3,0]
py = quad[0,1] - quad[1,1] + quad[2,1] - quad[3,1]
if abs(px) < 1e-10 and abs(py) < 1e-10:
SQ[0,0] = quad[1,0] - quad[0,0]
SQ[1,0] = quad[2,0] - quad[1,0]
SQ[2,0] = quad[0,0]
SQ[0,1] = quad[1,1] - quad[0,1]
SQ[1,1] = quad[2,1] - quad[1,1]
SQ[2,1] = quad[0,1]
SQ[0,2] = 0.
SQ[1,2] = 0.
SQ[2,2] = 1.
return SQ
else:
dx1 = quad[1,0] - quad[2,0]
dx2 = quad[3,0] - quad[2,0]
dy1 = quad[1,1] - quad[2,1]
dy2 = quad[3,1] - quad[2,1]
det = det2(dx1,dx2, dy1,dy2)
if det == 0.:
return None
SQ[0,2] = det2(px,dx2, py,dy2) / det
SQ[1,2] = det2(dx1,px, dy1,py) / det
SQ[2,2] = 1.
SQ[0,0] = quad[1,0] - quad[0,0] + SQ[0,2]*quad[1,0]
SQ[1,0] = quad[3,0] - quad[0,0] + SQ[1,2]*quad[3,0]
SQ[2,0] = quad[0,0]
SQ[0,1] = quad[1,1] - quad[0,1] + SQ[0,2]*quad[1,1]
SQ[1,1] = quad[3,1] - quad[0,1] + SQ[1,2]*quad[3,1]
SQ[2,1] = quad[0,1]
return SQ
#...............................................................................
def mapQuadToSquare( quad ):
return np.linalg.inv( mapSquareToQuad( quad ))
def mapQuadToQuad( a, b ):
return np.dot( mapQuadToSquare(a), mapSquareToQuad(b) )
def perstrans( X, t ):
""" perspective transform X Nx2, t 3x3:
[x0 y0 1] t = [a0 b0 w0] -> [a0/w0 b0/w0]
[x1 y1 1] t = [a1 b1 w1] -> [a1/w1 b1/w1]
...
"""
x1 = np.vstack(( X.T, np.ones(len(X)) ))
y = np.dot( t.T, x1 )
return (y[:-1] / y[-1]) .T
#...............................................................................
if __name__ == "__main__":
np.set_printoptions( 2, threshold=100, suppress=True ) # .2f
sq = np.array([[0,0], [1,0], [1,1], [0,1]])
quad = np.array([[171, 72], [331, 93], [333, 188], [177, 210]])
print "quad:", quad
print "square to quad:", perstrans( sq, mapSquareToQuad(quad) )
print "quad to square:", perstrans( quad, mapQuadToSquare(quad) )
dw, dh = 300, 250
rect = np.array([[0, 0], [dw, 0], [dw, dh], [0, dh]])
quadquad = mapQuadToQuad( quad, rect )
print "quad to quad transform:", quadquad
print "quad to rect:", perstrans( quad, quadquad )
"""
quad: [[171 72]
[331 93]
[333 188]
[177 210]]
square to quad: [[ 171. 72.]
[ 331. 93.]
[ 333. 188.]
[ 177. 210.]]
quad to square: [[-0. 0.]
[ 1. 0.]
[ 1. 1.]
[ 0. 1.]]
quad to quad transform: [[ 1.29 -0.23 -0. ]
[ -0.06 1.79 -0. ]
[-217.24 -88.54 1.34]]
quad to rect: [[ 0. 0.]
[ 300. 0.]
[ 300. 250.]
[ 0. 250.]]
"""
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2010-06-11 15:46:05
To, czego chcesz, nazywa się prostowaniem planarnym, i obawiam się, że to nie jest takie proste. To, co musisz zrobić, to odzyskać homografię , która odwzorowuje ten ukośny widok z boku Vana na widok przodem do kierunku jazdy. Photoshop / etc. miej narzędzia, aby to zrobić dla Ciebie, biorąc pod uwagę kilka punktów kontrolnych; jeśli chcesz zaimplementować to dla siebie, będziesz musiał zacząć zagłębiać się w wizję komputera.
Edit - OK, proszę bardzo: skrypt Pythona do wypaczania, używając OpenCV biblioteka, która ma wygodne funkcje do obliczania homografii i wypaczania obrazu dla Ciebie:
import cv
def warpImage(image, corners, target):
mat = cv.CreateMat(3, 3, cv.CV_32F)
cv.GetPerspectiveTransform(corners, target, mat)
out = cv.CreateMat(height, width, cv.CV_8UC3)
cv.WarpPerspective(image, out, mat, cv.CV_INTER_CUBIC)
return out
if __name__ == '__main__':
width, height = 400, 250
corners = [(171,72),(331,93),(333,188),(177,210)]
target = [(0,0),(width,0),(width,height),(0,height)]
image = cv.LoadImageM('fries.jpg')
out = warpImage(image, corners, target)
cv.SaveImage('fries_warped.jpg', out)
I wyjście:
OpenCV ma również powiązania C i C++, lub możesz użyć EmguCV dla owijarki. NET; API jest dość spójne we wszystkich językach, więc możesz to replikować w dowolnym języku, który Ci odpowiada.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2010-06-11 12:43:43
Myślę, że to, czego potrzebujesz, to transformacja afiniczna , którą można osiągnąć za pomocą matmy macierzowej.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2010-06-07 19:22:16