Obróbka grafiki 3D - jak obliczyć matrycę modelview
Mam problem ze zrozumieniem matematyki do konwersji z przestrzeni obiektowej do przestrzeni widoku. Robię to w sprzęcie i mam matrycę Atranspose poniżej:
ATranspose =
[rightx upx lookx 0]
[righty upy looky 0]
[rightz upz lookz 0]
[-eyeright -eyeup -eyelook 1]
Następnie, aby znaleźć punkt, który zrobimy:
[x,y,z,1] = [x',y',z',1]*ATranspose
xnew = xold*rightx + xold*righty + xold*rightz + xold*(-eyeright)
Może być również
[x,y,z,1]=atranspose*[x',y',z',1]T
2 answers
Ta odpowiedź jest prawdopodobnie znacznie dłuższa niż powinna być. Przejdź do dołu akapity 2 lub tak, jeśli już rozumiesz większość matematyki macierzy.
Najłatwiej zacząć od spojrzenia na 1-wymiarowy problem. W 1D mamy punkty na linii. Możemy je przeskalować lub przetłumaczyć. Rozważmy trzy punkty i,j, k i macierz transformacji M .
M = [ s t ]
[ 0 1 ]
i = [1] j = [-2] k = [0]
[1] [ 1] [1]
j k i
─┴──┴──┴──┴──┴─
-2 -1 0 1 2
Gdy mnożymy przez M , otrzymujemy:
i' = Mi = [ s t ][ 1] = [ s+t ]
[ 0 1 ][ 1] [ 1 ]
j' = Mj = [ s t ][-2] = [-2s+t]
[ 0 1 ][ 1] [ 1 ]
k' = Mk = [ s t ][ 0] = [ t ]
[ 0 1 ][ 1] [ 1 ]
Więc jeśli Przypisz wartości s i t, wtedy otrzymamy różne przekształcenia na naszym "trójkącie" 1D. Skalowanie zmienia odległość między "punktami" , podczas gdy czyste tłumaczenie przesuwa je w stosunku do początku, zachowując stałą odstępu:
s=1 t=0 s=2 t=1 s=1 t=2
j k i j k i j k i
─┴──┴──┴──┴──┴─ ─┴──┴──┴──┴──┴─ ─┴──┴──┴──┴──┴─
-2 -1 0 1 2 -3 -1 1 3 5 0 1 2 3 4
Ważne jest, aby pamiętać, że kolejność przekształceń jest krytyczna. Te transformacje 1D skalują się i następnie tłumaczą. Gdybyś miał najpierw przetłumaczyć, to "punkt" byłby różną odległością od pochodzenia, a więc czynnik skalowania wpłynie na to inaczej. Z tego powodu przekształcenia są często przechowywane w oddzielnych macierzach, tak że kolejność jest jasna.
Jeśli przeniesiemy się do 2D, otrzymamy macierz N:
[1 0 tx][ cos(a) sin(a) 0][sx 0 0] [ sx*cos(a) sx*sin(a) tx ]
N =[0 1 ty][-sin(a) cos(a) 0][ 0 sy 0]=[-sy*sin(a) sy*cos(a) ty ]
[0 0 1 ][ 0 0 1][ 0 0 1] [ 0 0 1 ]
Ta macierz będzie 1) skalowanie punktu przez sx,sy, 2) obróć punkt wokół początku o a stopnie, a następnie 3 Przetłumacz punkt przez tx, ty . Zauważ, że macierz ta jest skonstruowany przy założeniu, że punkty są reprezentowane jako wektory kolumnowe i że mnożenie będzie miało miejsce jako Np. Jak powiedział datenwolf, jeśli chcesz użyć reprezentacji wektorowej wiersza punktów, ale zastosuj tę samą transformację, możesz transponować wszystko i zamienić kolejność. Jest to ogólna właściwość mnożenia macierzy: (AB)^T = (B^T) (A^T) .
To powiedziawszy, możemy mówić o przemianach w kategoriach obiektu, świata i współrzędnych oczu. Jeśli oko siedzi na początku świata, patrząc w dół świata negatywnej osi z, Z +x w prawo i + y w górę, a obiekt, sześcian, siedzi 10 jednostek w dół-z (wyśrodkowany na osi z), o szerokości 2 wzdłuż x świata, głębokość 3 wzdłuż z i wysokość 4 wzdłuż y świata. następnie, jeśli środek sześcianu jest lokalnym ramką odniesienia obiektu i jego lokalne osie wygodnie wyrównują się z osiami świata. Wtedy wierzchołki pola we współrzędnych obiektu są wariantami na [+/-1,+/-2,+/-1.5]^T. Wierzchołek Bliski, górny, prawy (z punktu widzenia oka) ma współrzędne obiektu [1,2,1.5]^T, W współrzędnych świata , ten sam wierzchołek jest [1,2,-8.5]^T (1.5-10=-8.5). Ze względu na to, gdzie jest oko, w którą stronę ono wskazuje, i fakt, że definiujemy nasze oko tak samo jak OpenGL, ten wierzchołek ma te same współrzędne oczu Jak współrzędne świata. Więc przesuńmy i obróćmy oko tak, aby oko X było w prawo (rt) a oko y jest w górę i oko -z jest spójrz (lk) i oko jest umieszczone w [eyeright(ex) eyeup(ey) eyelook(ez)]^T. Ponieważ chcemy przekształcić współrzędne obiektu na współrzędne oczu (co oznacza, że będziemy traktować oko jako źródło), weźmiemy odwrotność tych przekształceń i zastosujemy je do wierzchołków obiektów (po przekształceniu ich w Współrzędne świata). Więc będziemy mieli:
ep = [WORLD_TO_EYE]*[OBJECT_TO_WORLD]*wp;
Dokładniej, dla naszego wierzchołka zainteresowania, będziemy mieć:
[ rt.x rt.y rt.z 0][1 0 0 -ex][1 0 0 0 ][ 1 ]
[ up.x up.y up.z 0][0 1 0 -ey][0 1 0 0 ][ 2 ]
[-lk.x -lk.y -lk.z 0][0 0 1 -ez][0 0 1 -10][1.5]
[ 0 0 0 1][0 0 0 1 ][0 0 0 1 ][ 1 ]
Dla wygody, oddzieliłem tłumaczenie, na które wpływa rotacja oka. Właściwie, teraz, kiedy napisałem tak wiele, może to być punkt zamieszania. Matryca, którą dałeś, obróci się, a następnie przełoży. Założyłem, że tłumaczenie oka jest we współrzędnych świata. Ale jak napisałeś w swoim pytaniu, to faktycznie wykonuje tłumaczenie we współrzędnych oczu. Zanegowałem również lk ponieważ zdefiniowaliśmy oko, aby patrzeć w dół ujemną oś z, ale aby zrobić standardową macierz obrotu, chcemy użyć wartości dodatnich.
W każdym razie, mogę kontynuować, ale może to już odpowiada na twoje pytanie.
Ciąg dalszy:
Wyjaśnienie powyższego nieco dalej, rozdzielenie transformacji oka na dwa składniki znacznie ułatwia znalezienie odwrotności. Łatwo zauważyć, że jeśli tłumaczenie tx przesuwa oko gdzieś w stosunku do obiektów na świecie, możemy utrzymać te same względne pozycje między okiem a punktami na świecie, przesuwając wszystko na świecie o -tx i utrzymując oko w pozycji nieruchomej.
Podobnie, rozważ orientację oka zdefiniowaną przez jego domyślną prawo, up , and look wektory:
[1] [0] [ 0]
d_rt=[0] d_up=[1] d_lk=[ 0]
[0] [0] [-1]
Tworzenie macierzy obrotu, która wskazuje te trzy wektory w nowym kierunku jest łatwe. Po prostu ustawiamy nasze trzy nowe osie rt, do góry, lk (jako wektory kolumnowe):
[rt.x up.x -lk.x 0]
[rt.y up.y -lk.y 0]
[rt.z up.z -lk.z 0]
[ 0 0 0 1]
Łatwo zauważyć, że jeśli powiększysz d_rt, d_up i d_lk i pomnożysz przez powyższą macierz, otrzymasz rt, odpowiednio do góry i lk z powrotem. Więc zastosowaliśmy transformację, którą chcieliśmy. Aby mieć prawidłową rotację, trzy wektory muszą być ortonormalne. To tylko zmiana podstaw. Z tego powodu możemy znaleźć odwrotność tej macierzy całkiem wygodnie, przyjmując jej transpozycję. To właśnie zrobiłem. powyżej. Jeśli zastosujesz tę transponowaną matrycę do wszystkich punktów w współrzędnych świata i pozostawisz oko nieruchome, punkty utrzymają tę samą pozycję, względem oka, tak jakby oko się obróciło.
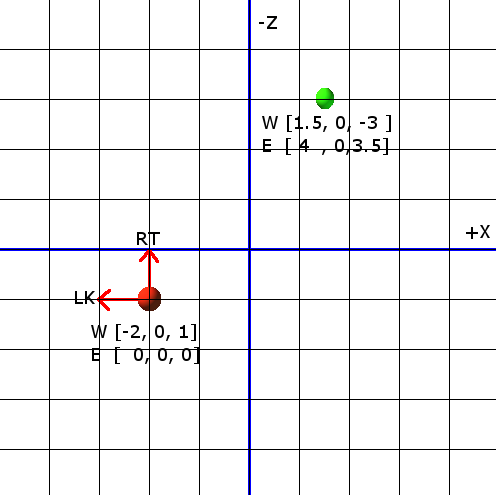
Na Przykład:
Przypisać (w współrzędnych świata):
[ 0] [0] [-1] [-2] [1.5]
rt=[ 0] up=[1] lk=[ 0] eye=[ 0] obj=[ 0 ]
[-1] [0] [ 0] [ 1] [-3 ]
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2011-04-27 21:05:15
Jeśli transponujesz ATranspose w drugim wariancie, tzn.
[x,y,z,w]^T = ATranspose^T * [x',y',z',w']^T
BTW, ^T oznacza transpozycję więc autor oryginału prawdopodobnie miał na myśli
[x,y,z,w] = [x',y',z',w'] * A^T
I przepisane
[x,y,z,w]^T = A^T * [x',y',z',w']^T
Wtedy wszystkie te sformułowania są równie poprawne.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2011-04-27 09:46:25