Podstawowa Teoria Podwójnego Konturowania
Szukałem w google, ale nie mogę znaleźć nic podstawowego. W najbardziej podstawowej formie, jak zaimplementowane jest dual contouring (dla terenu voxel)? Wiem, co robi i dlaczego, ale nie mogę zrozumieć, jak to zrobić. Js lub C# (najlepiej) jest dobre.Czy ktoś kiedyś używał podwójnego konturowania i może to krótko wyjaśnić?
1 answers
Ok. Znudziło mi się dziś i postanowiłem dać sobie szansę na dual contouring. Jak powiedziałem w komentarzach, wszystkie istotne materiały znajdują się w sekcji 2 następującego artykułu:
Http://www.frankpetterson.com/publications/dualcontour/dualcontour.pdf
W szczególności topologia siatki jest opisana w części 2.2 w następującej sekcji, cytuję:
To wszystko! Rozwiązujesz liniowy problem najmniejszych kwadratów, aby uzyskać Wierzchołek dla każdego sześcianu, a następnie łączysz sąsiednie wierzchołki z quadami. Więc korzystając z tego podstawowego pomysłu, napisałem dual contouring isosurface extractor w Pythonie za pomocą numpy (częściowo tylko po to, aby zaspokoić moją chorobliwą ciekawość, jak to działa). Oto kod:
Dla każdego sześcianu, który wykazuje zmianę znaku, Wygeneruj wierzchołek umieszczony na minimalizatorze funkcji kwadratowej równania 1.
Dla każdej krawędzi, która wykazuje zmianę znaku, generujemy kwadrat łączący minimalizujące wierzchołki czterech sześcianów zawierających krawędź.
import numpy as np
import numpy.linalg as la
import scipy.optimize as opt
import itertools as it
#Cardinal directions
dirs = [ [1,0,0], [0,1,0], [0,0,1] ]
#Vertices of cube
cube_verts = [ np.array([x, y, z])
for x in range(2)
for y in range(2)
for z in range(2) ]
#Edges of cube
cube_edges = [
[ k for (k,v) in enumerate(cube_verts) if v[i] == a and v[j] == b ]
for a in range(2)
for b in range(2)
for i in range(3)
for j in range(3) if i != j ]
#Use non-linear root finding to compute intersection point
def estimate_hermite(f, df, v0, v1):
t0 = opt.brentq(lambda t : f((1.-t)*v0 + t*v1), 0, 1)
x0 = (1.-t0)*v0 + t0*v1
return (x0, df(x0))
#Input:
# f = implicit function
# df = gradient of f
# nc = resolution
def dual_contour(f, df, nc):
#Compute vertices
dc_verts = []
vindex = {}
for x,y,z in it.product(range(nc), range(nc), range(nc)):
o = np.array([x,y,z])
#Get signs for cube
cube_signs = [ f(o+v)>0 for v in cube_verts ]
if all(cube_signs) or not any(cube_signs):
continue
#Estimate hermite data
h_data = [ estimate_hermite(f, df, o+cube_verts[e[0]], o+cube_verts[e[1]])
for e in cube_edges if cube_signs[e[0]] != cube_signs[e[1]] ]
#Solve qef to get vertex
A = [ n for p,n in h_data ]
b = [ np.dot(p,n) for p,n in h_data ]
v, residue, rank, s = la.lstsq(A, b)
#Throw out failed solutions
if la.norm(v-o) > 2:
continue
#Emit one vertex per every cube that crosses
vindex[ tuple(o) ] = len(dc_verts)
dc_verts.append(v)
#Construct faces
dc_faces = []
for x,y,z in it.product(range(nc), range(nc), range(nc)):
if not (x,y,z) in vindex:
continue
#Emit one face per each edge that crosses
o = np.array([x,y,z])
for i in range(3):
for j in range(i):
if tuple(o + dirs[i]) in vindex and tuple(o + dirs[j]) in vindex and tuple(o + dirs[i] + dirs[j]) in vindex:
dc_faces.append( [vindex[tuple(o)], vindex[tuple(o+dirs[i])], vindex[tuple(o+dirs[j])]] )
dc_faces.append( [vindex[tuple(o+dirs[i]+dirs[j])], vindex[tuple(o+dirs[j])], vindex[tuple(o+dirs[i])]] )
return dc_verts, dc_faces
Nie jest to bardzo szybkie, ponieważ używa ogólnych, nieliniowych metod wyszukiwania korzeni SciPy, aby znaleźć punkty krawędzi na powierzchni izosurface. Wydaje się jednak, że działa dość dobrze i w dość ogólny sposób. Aby go przetestować, uruchomiłem go za pomocą następującego przypadku testowego (w mayavi2 visualization toolkit):
import enthought.mayavi.mlab as mlab
center = np.array([16,16,16])
radius = 10
def test_f(x):
d = x-center
return np.dot(d,d) - radius**2
def test_df(x):
d = x-center
return d / sqrt(np.dot(d,d))
verts, tris = dual_contour(f, df, n)
mlab.triangular_mesh(
[ v[0] for v in verts ],
[ v[1] for v in verts ],
[ v[2] for v in verts ],
tris)
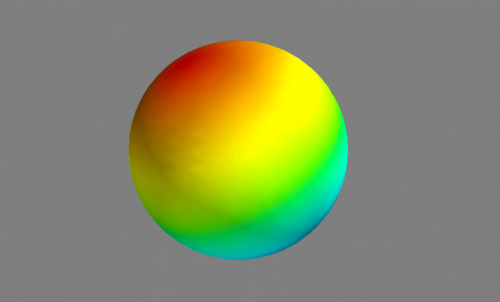
To definiuje sferę jako równanie niejawne i rozwiązuje dla 0-izosurface przez podwójne konturowanie. Kiedy uruchomiłem go w zestawie narzędzi, był to wynik:
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/doraprojects.net/template/agent.layouts/content.php on line 54
2011-06-28 06:28:23